Machine Vision Optimisation for Automotive Test Benches


Developed a cost-effective machine vision pipeline to automate throttle position sensor validation, improving repeatability, operator safety, and inspection throughput on high-cycle endurance rigs.
Objective
Benchmarked legacy end-of-line setups and designed a fiducial marker-based measurement flow that replaces manual inspection, allowing long-duration component tests to run autonomously with reliable data capture.
Methodology
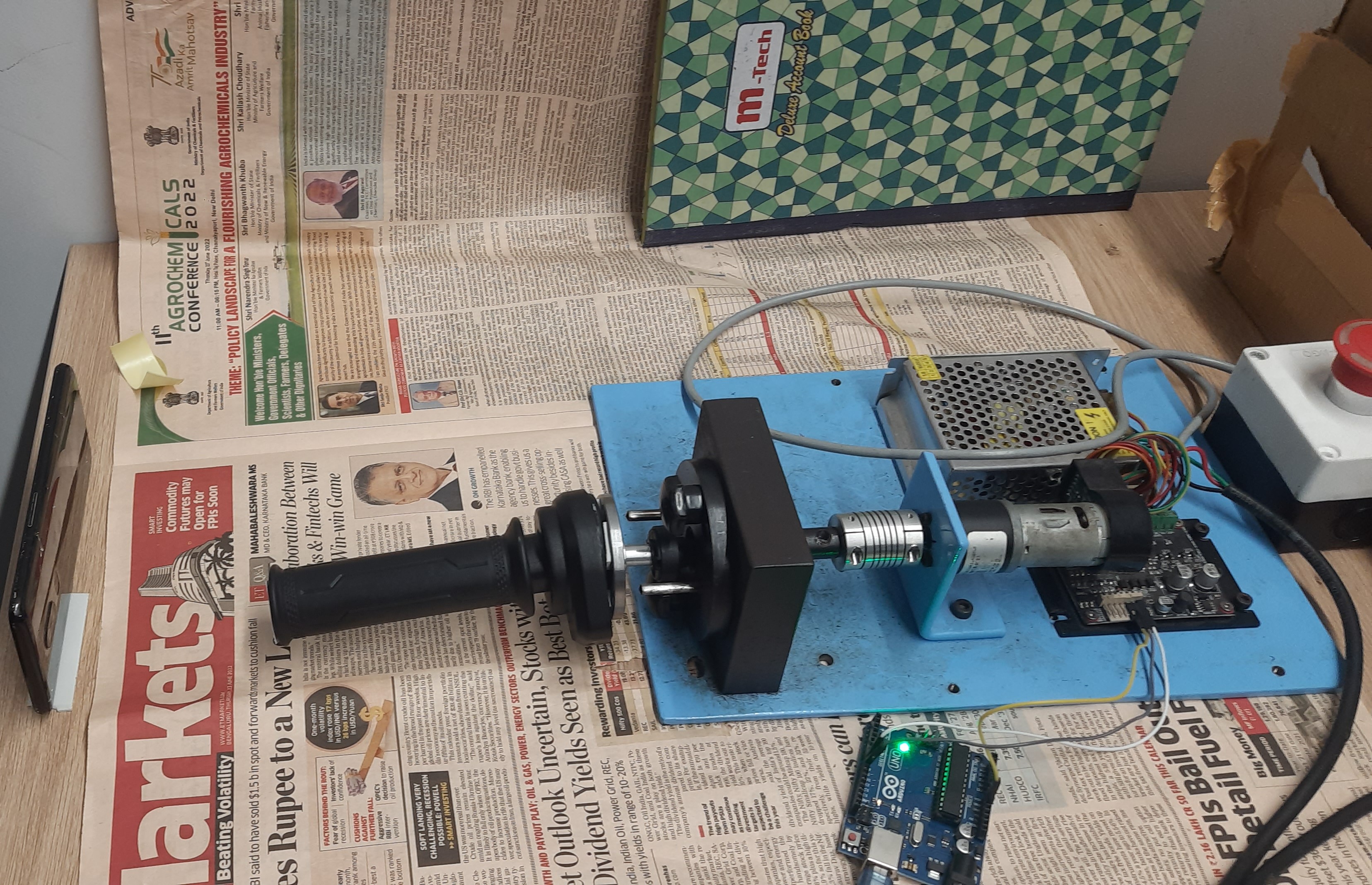
The solution ingests continuous video streams from a monocular camera, tracks fiducial markers on throttle actuators, and computes position deltas to validate sensor behavior under load. Control inputs are swept via low-cost motor actuators, while automated scripts flag out-of-tolerance responses for operator review.
Technology Stack
- OpenCV pipelines for marker detection and pixel-to-angle calibration.
- Custom fiducial markers to support camera resectioning and drift compensation.
- Python services orchestrating acquisition, analytics, and result logging.
- Cost-effective monocular camera, motor actuators without encoders, and compact power electronics.
Key Features
- Automates throttle position sensor validation for endurance testing campaigns.
- Delivers consistent measurements by pairing fiducial tracking with drift compensation.
- Flags out-of-tolerance responses in real time to accelerate technician triage.
- Packaged for rapid deployment on additional automotive component test rigs.
Outcome
Demonstrated reliable, automated TPS validation that reduces technician involvement, improves product quality, and establishes a template for extending vision-based diagnostics to additional automotive components.