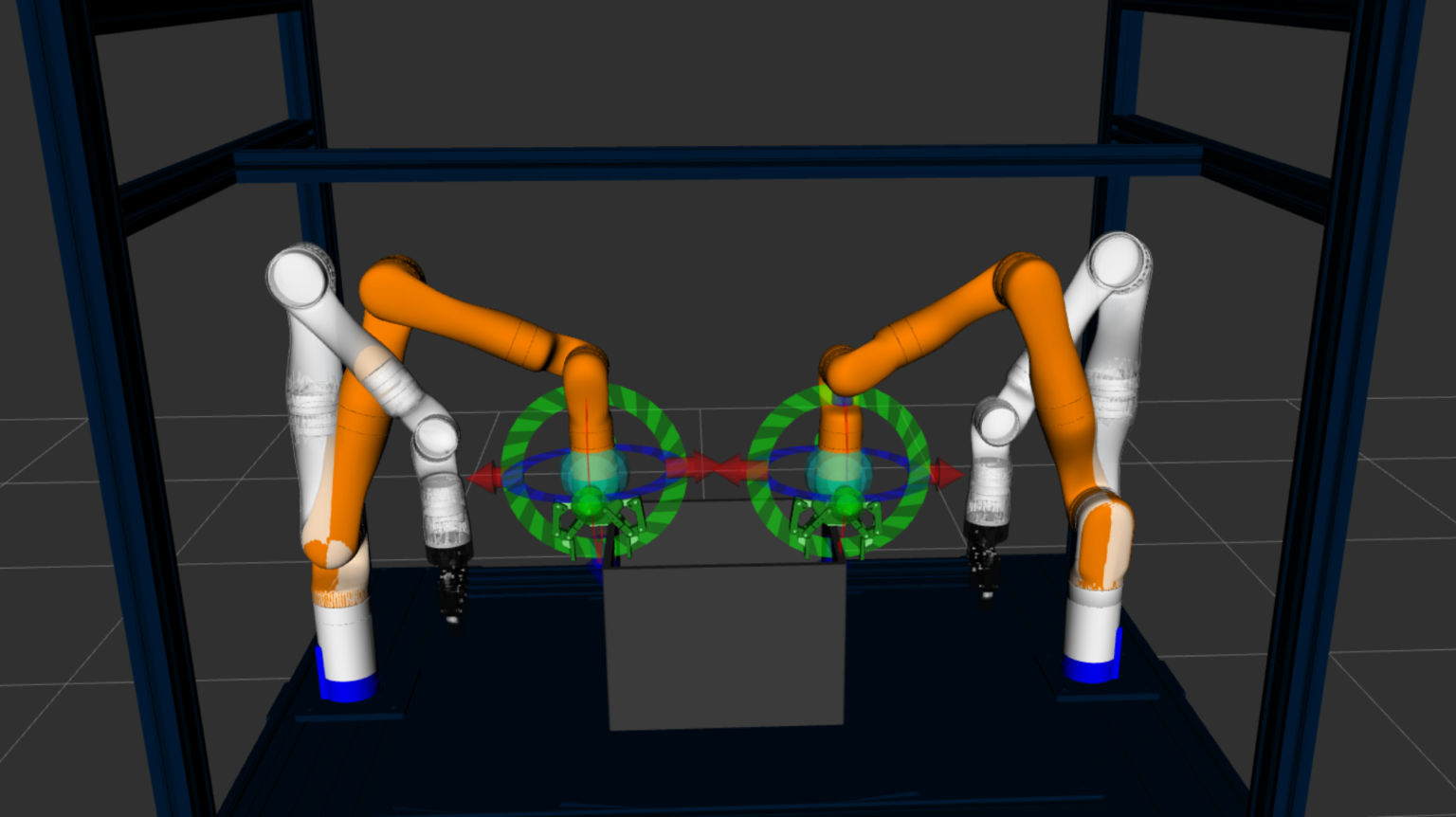
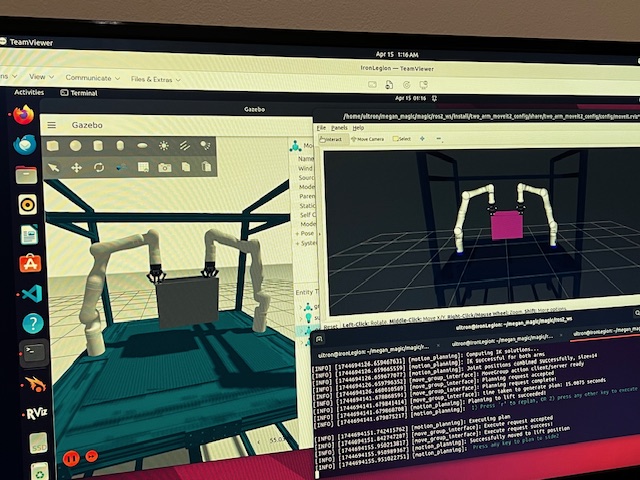
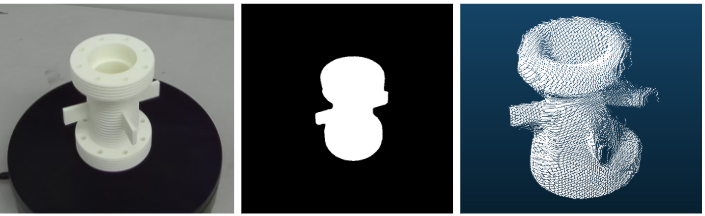

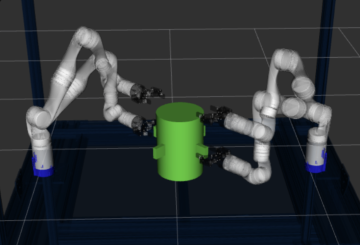

MAGIC: Manipulation for Automated Geometric Inspection and Construction
Architected a ROS2-driven dual-arm system that reorients WAAM parts for full-surface inspection, merging perception, motion planning, and reconstruction pipelines.
Deep dives into robotics, embodied AI, and machine learning projects. Each case study captures the challenge, research process, and outcomes.
Browse the visual gallery →
Architected a ROS2-driven dual-arm system that reorients WAAM parts for full-surface inspection, merging perception, motion planning, and reconstruction pipelines.
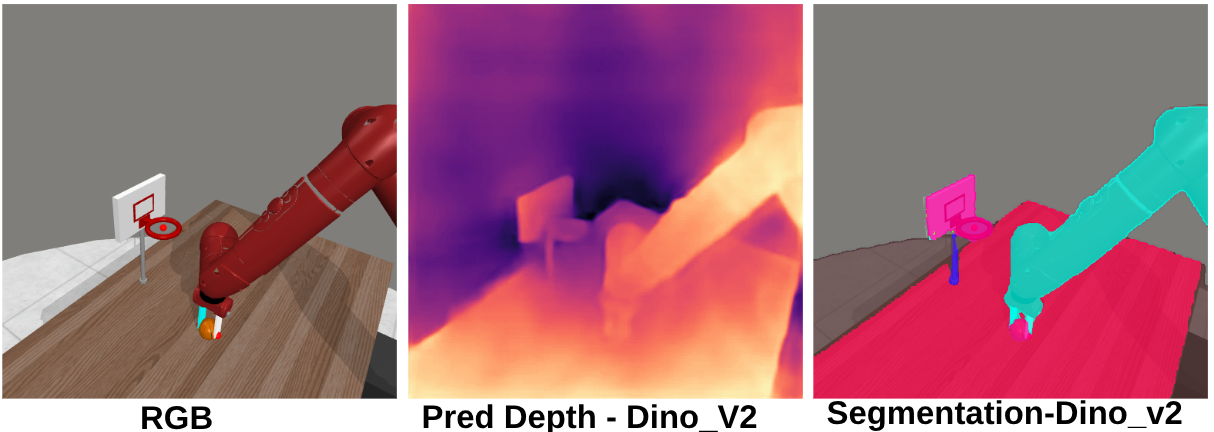
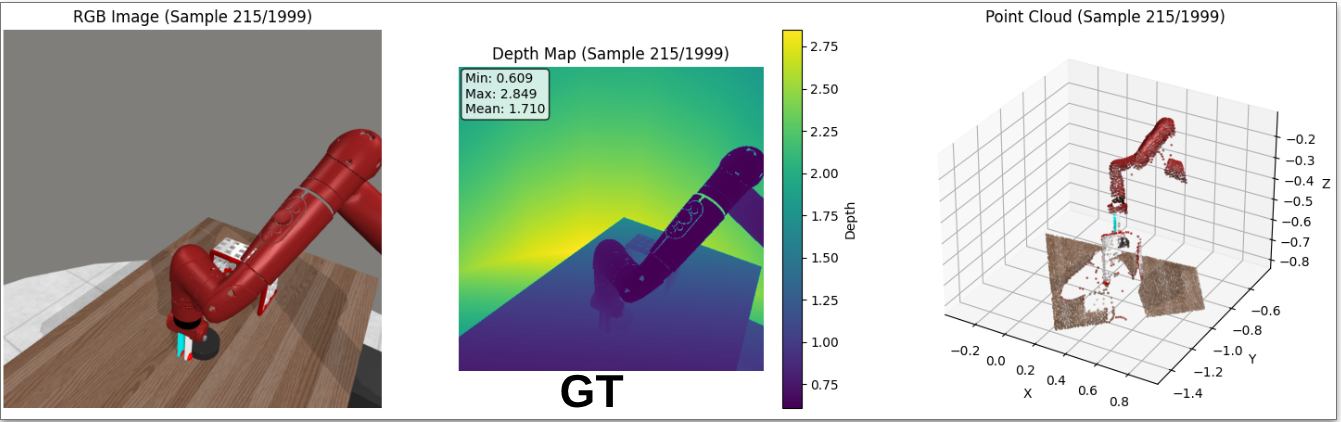
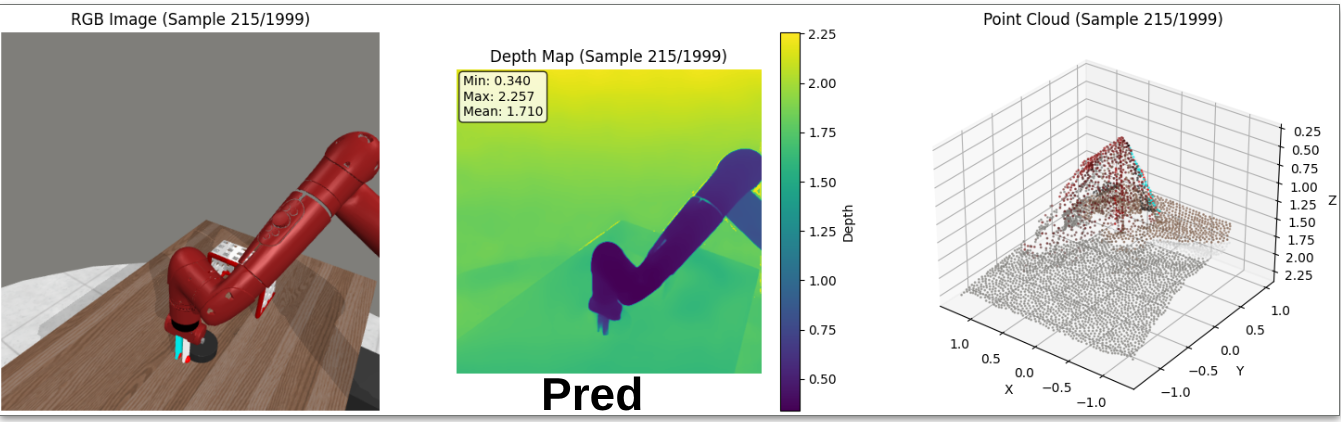
Investigated "software-only 3D" pipelines to inject spatial reasoning into Vision-Language-Action models, achieving 100% success on planar tasks without specialized depth hardware.
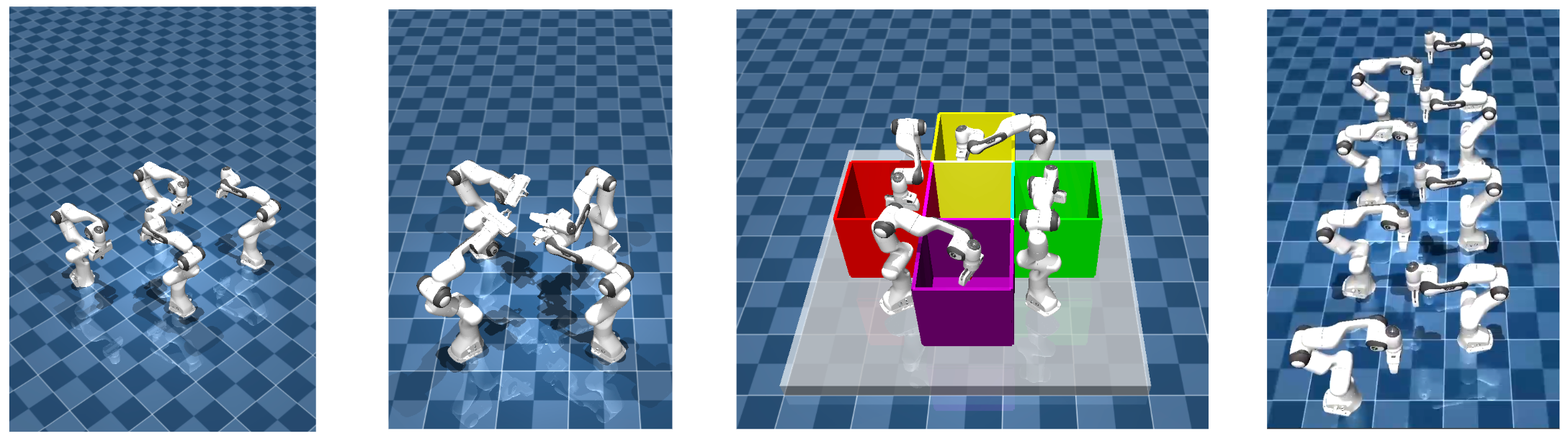
Implemented a full suite of planning algorithms (CBS, ECBS, RRT-Connect) from scratch in C++ to benchmark xECBS—an experience-accelerated framework that achieves 3x speedups in coordinating up to 8 high-DOF arms.
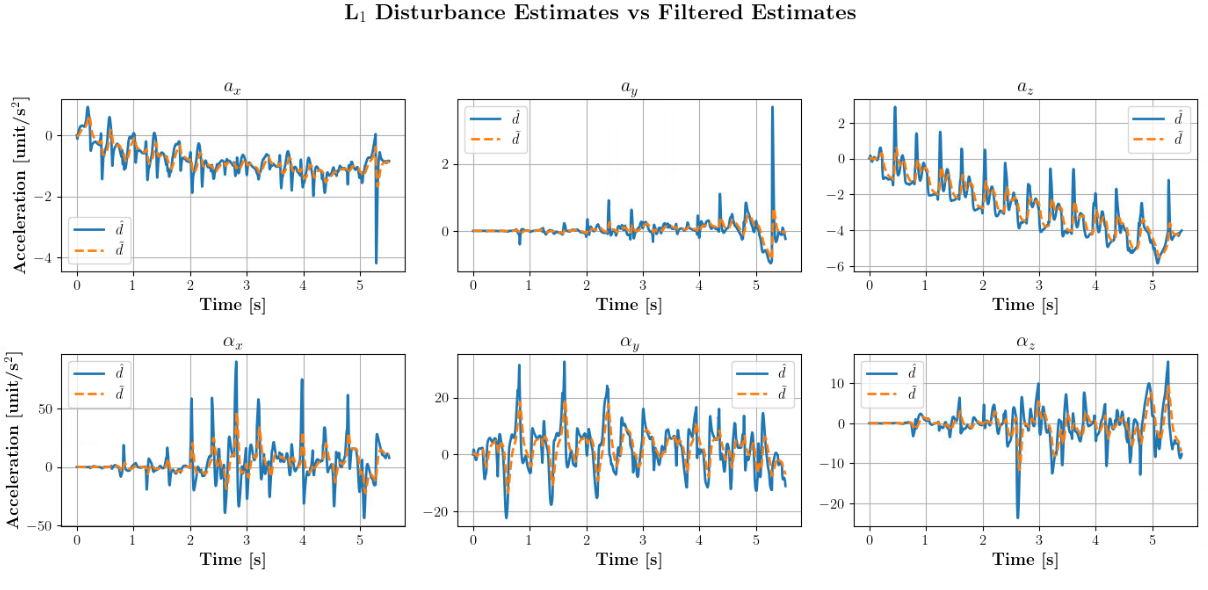
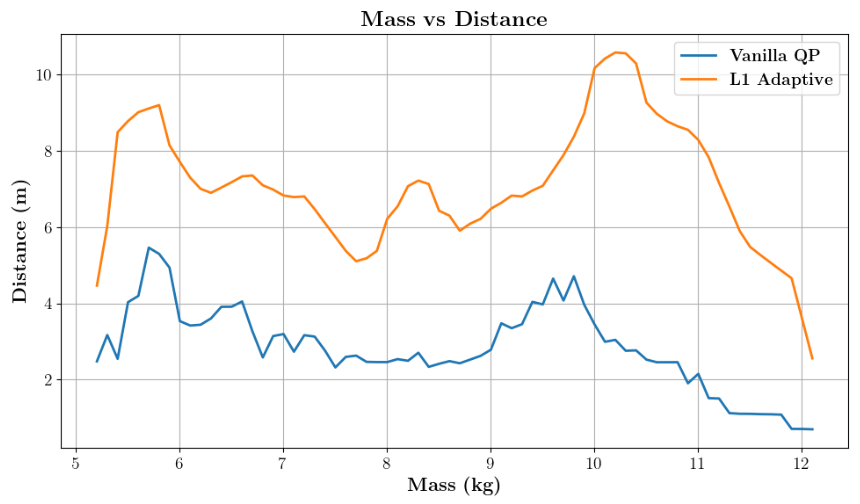
Integrated an L1 adaptive disturbance estimator with CAJUN’s centroidal policy to stabilize quadruped jumping despite payload shifts and inertia mismatch.
Designing a policy for safe, robust wheeled-biped motion that transports liquids without spillage across uneven warehouse terrain. Standing equilibrium policy achieved; velocity-control behaviors in progress.
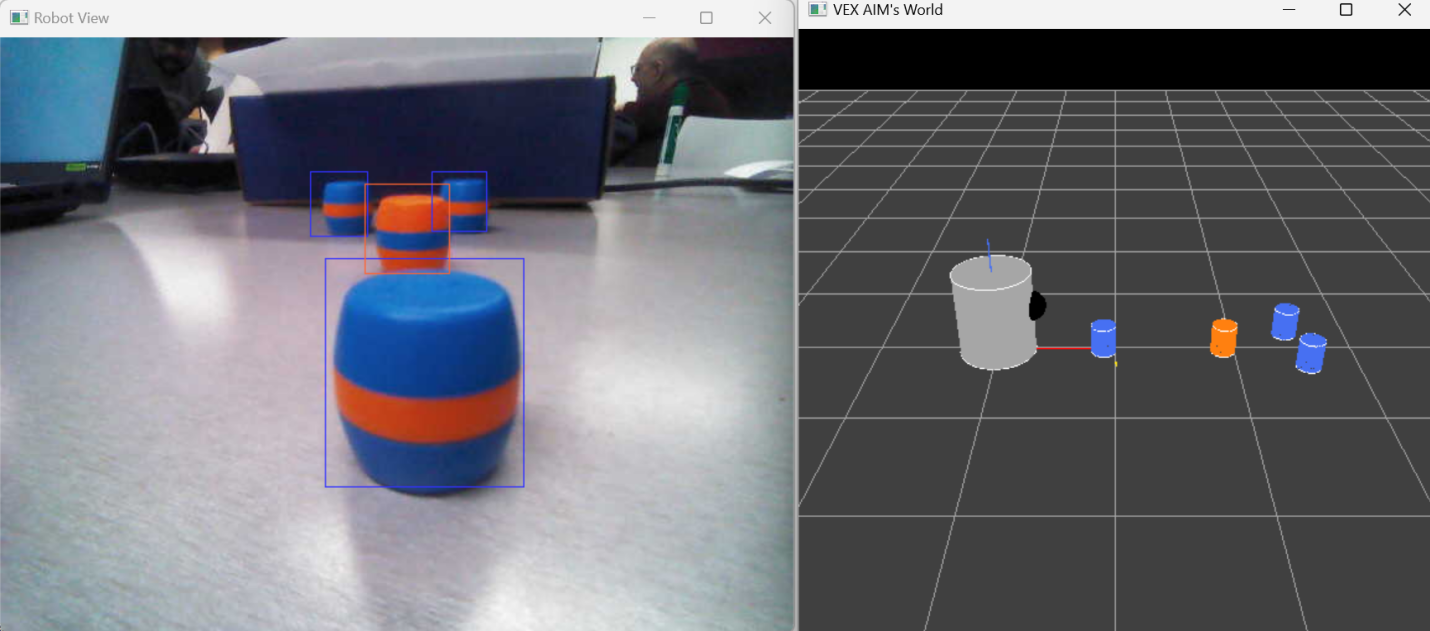
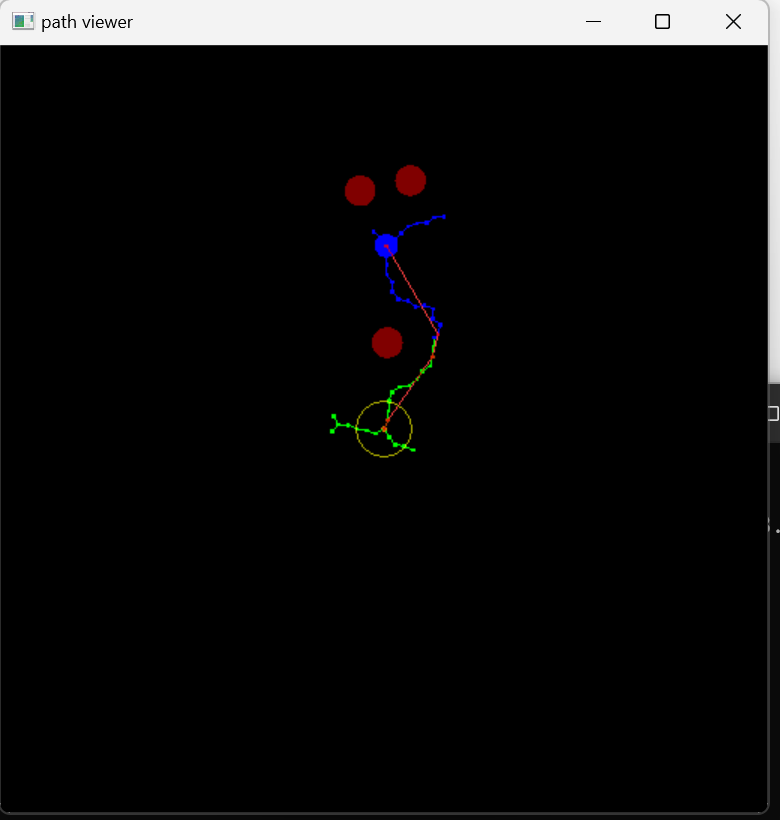
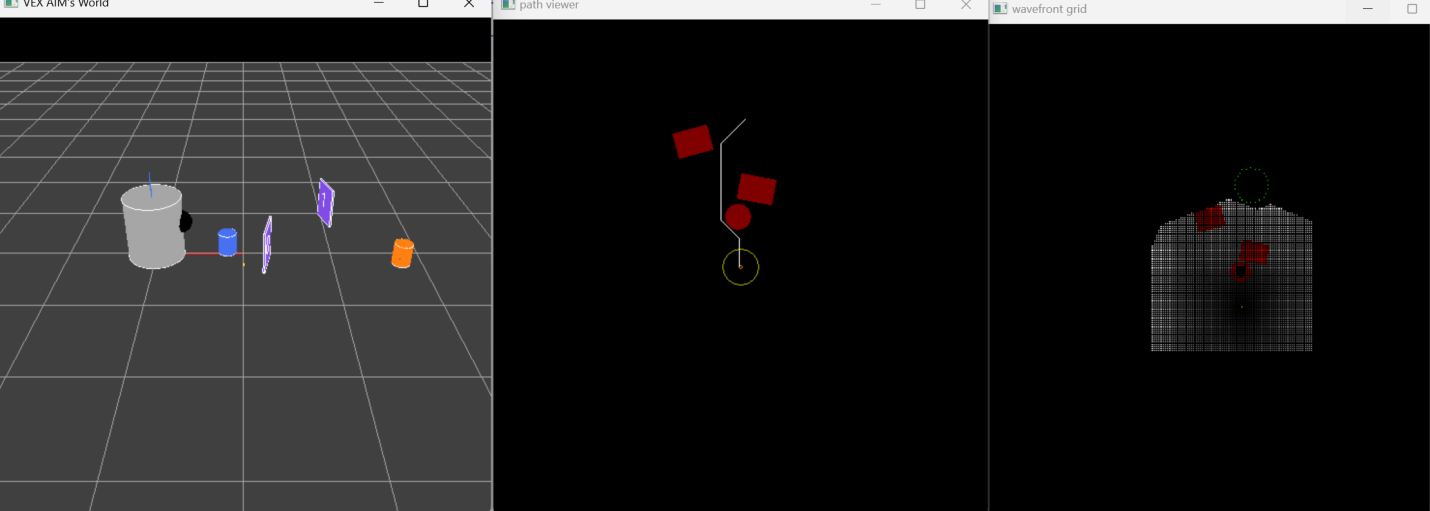
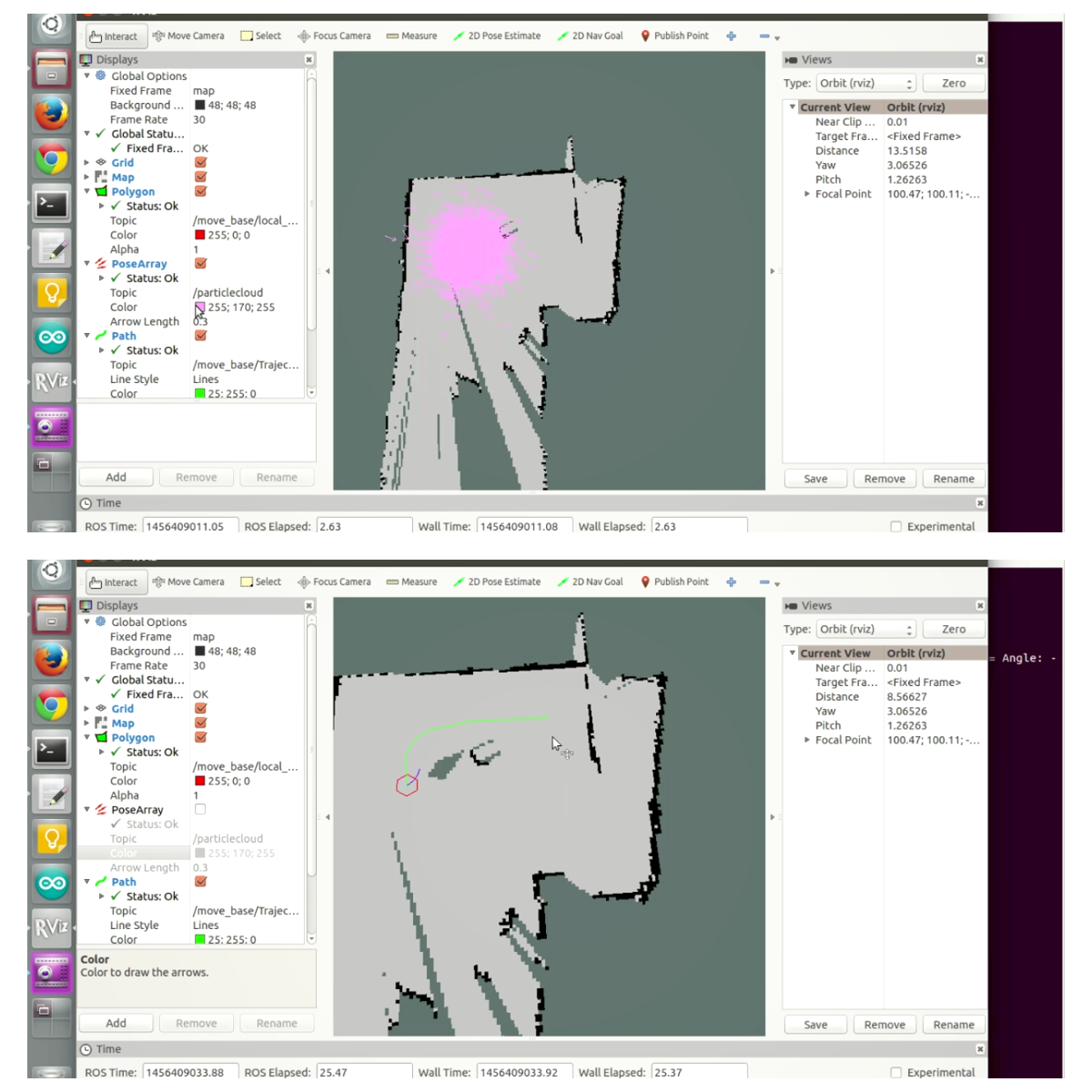
End-to-end autonomy stack for the VEX V5 platform: particle-filter SLAM, Wavefront/RRT planners, controllers, and conversational HRI.



Modular autonomy stack featuring LiDAR disparity extender, EKF sensor fusion, and MPC control; demonstrated live at the Safety21 Expo.
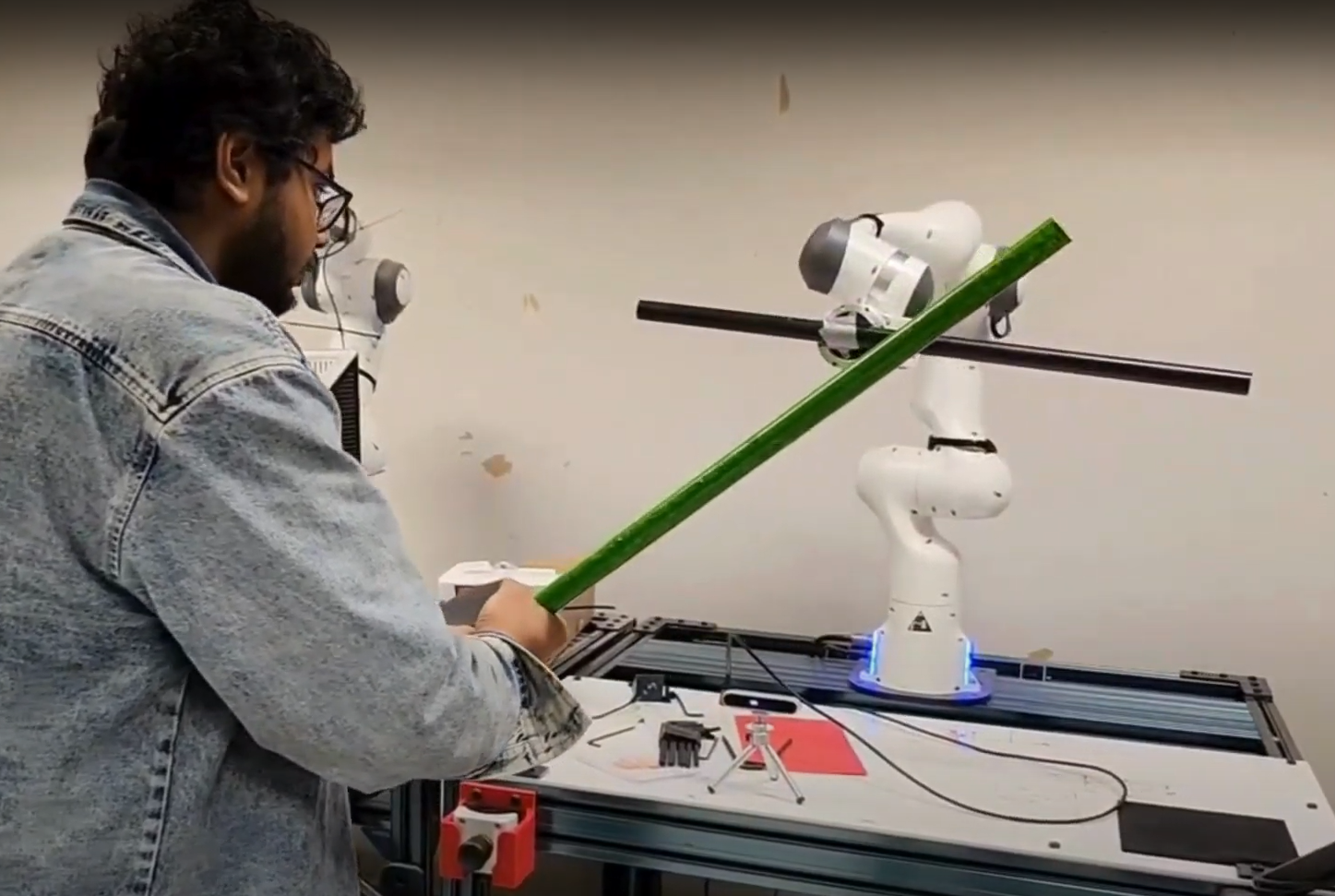


Built a perception-led pick-and-place system with real-time visual tracking integrated into a ROS2 manipulation stack.
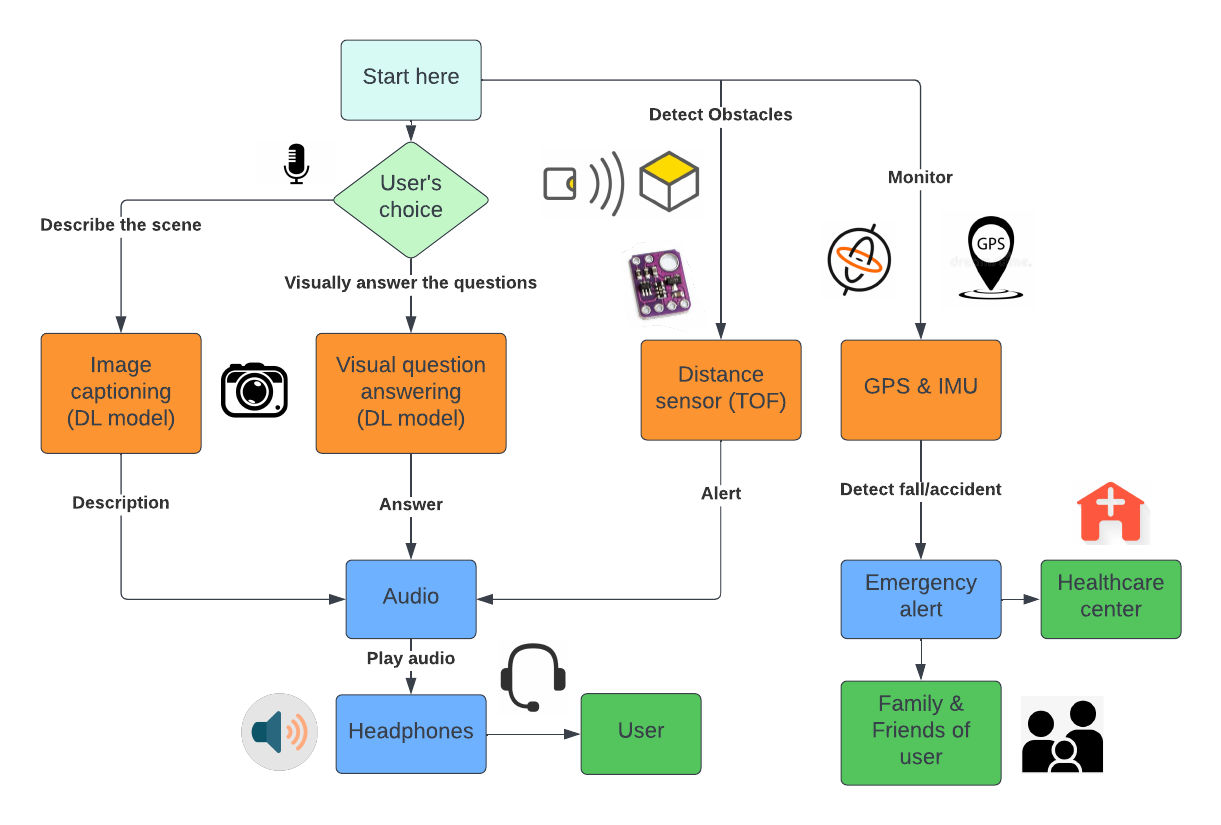
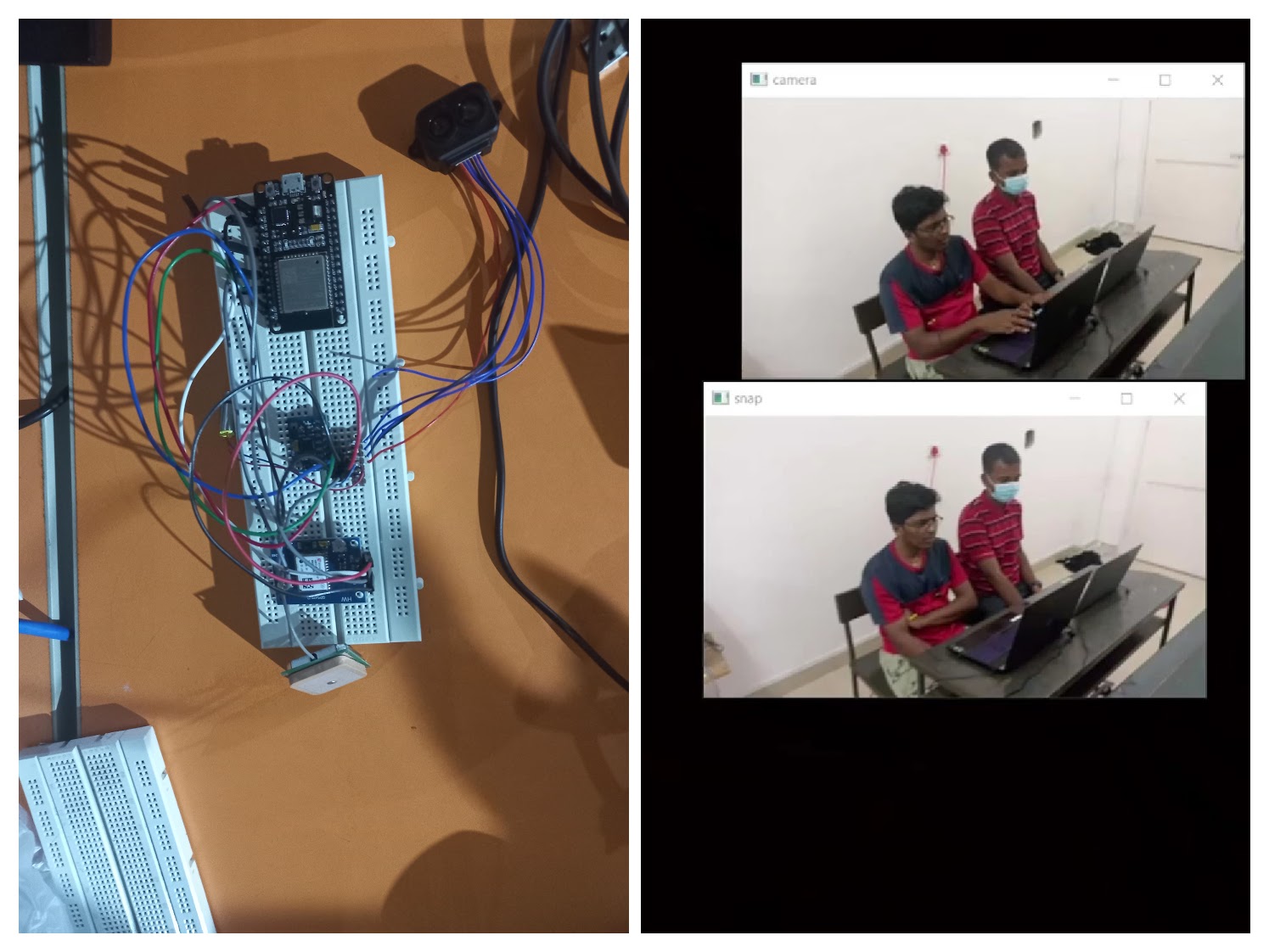
Affordable wearable blending deep learning vision, sensor fusion, and safety telemetry to guide visually impaired users with real-time audio cues.
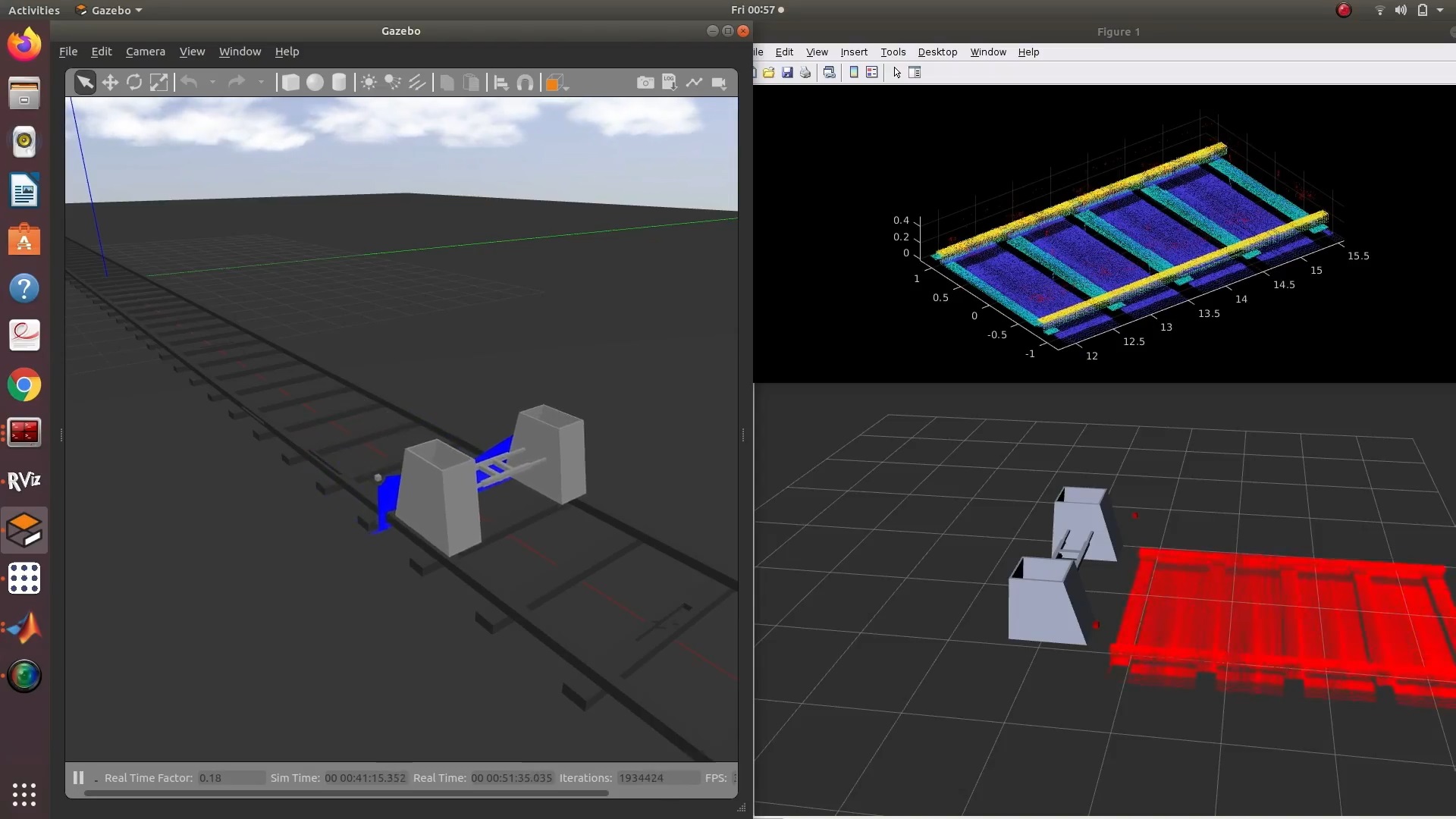

ROS-driven inspection robot combining ultrasonic, laser, and vision analytics with a live dashboard to surface actionable maintenance alerts for rail operators.


Open-source Pixhawk + ROS quadcopter platform enabling gesture control, person tracking, and dockerized simulation for autonomy research.
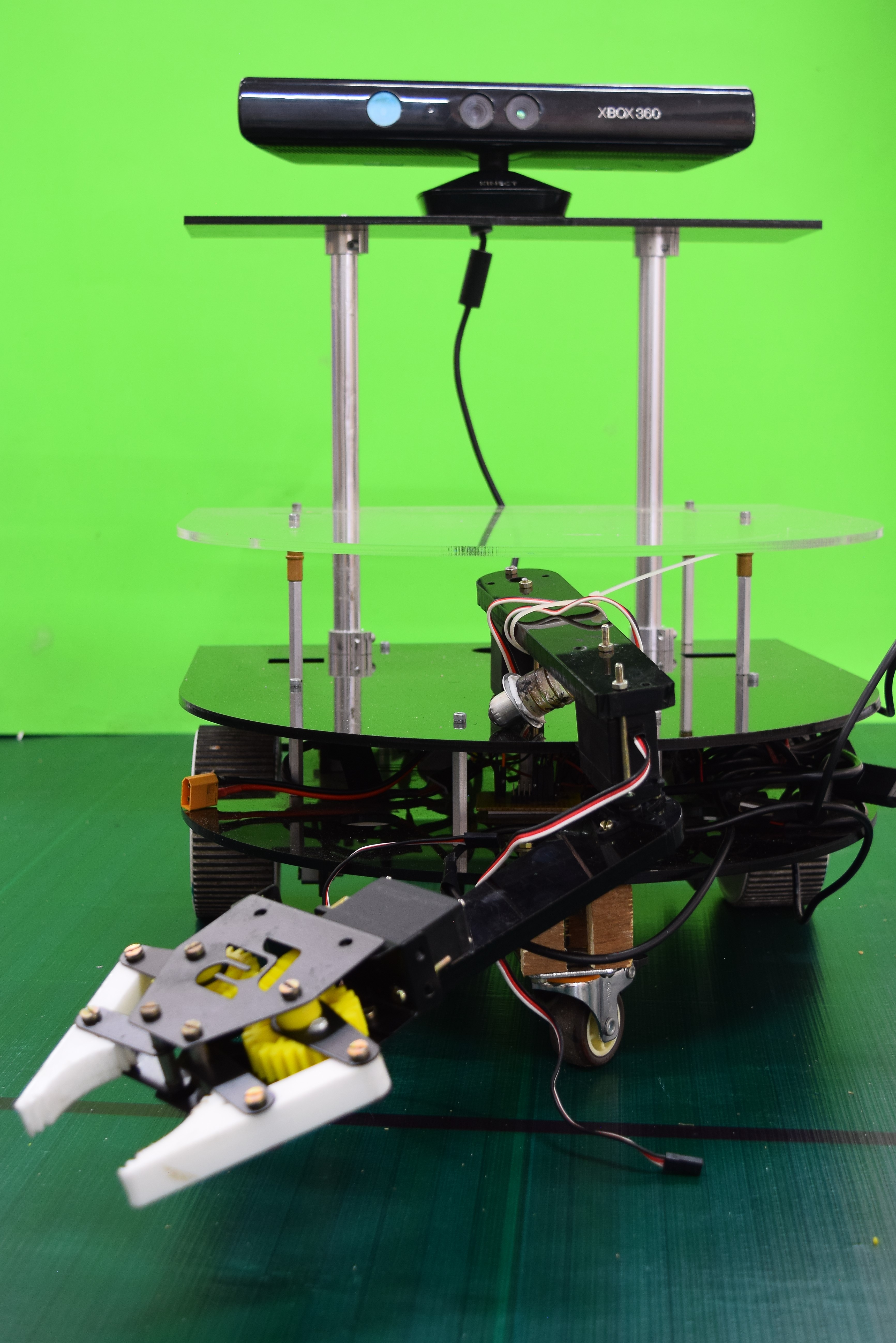
Full-stack personal assistant robot integrating SLAM, speech interfaces, and depth-guided manipulation for responsive home assistance.
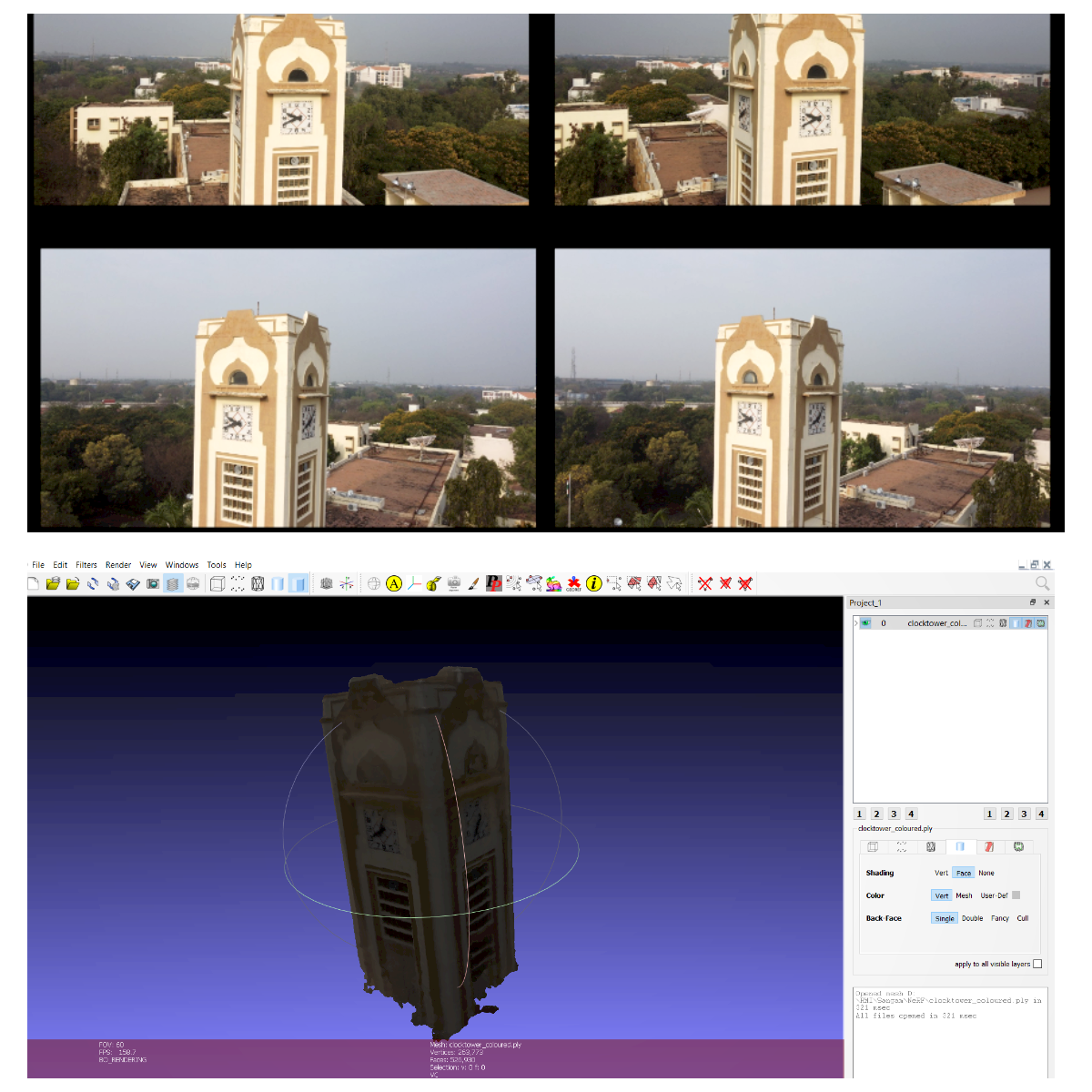
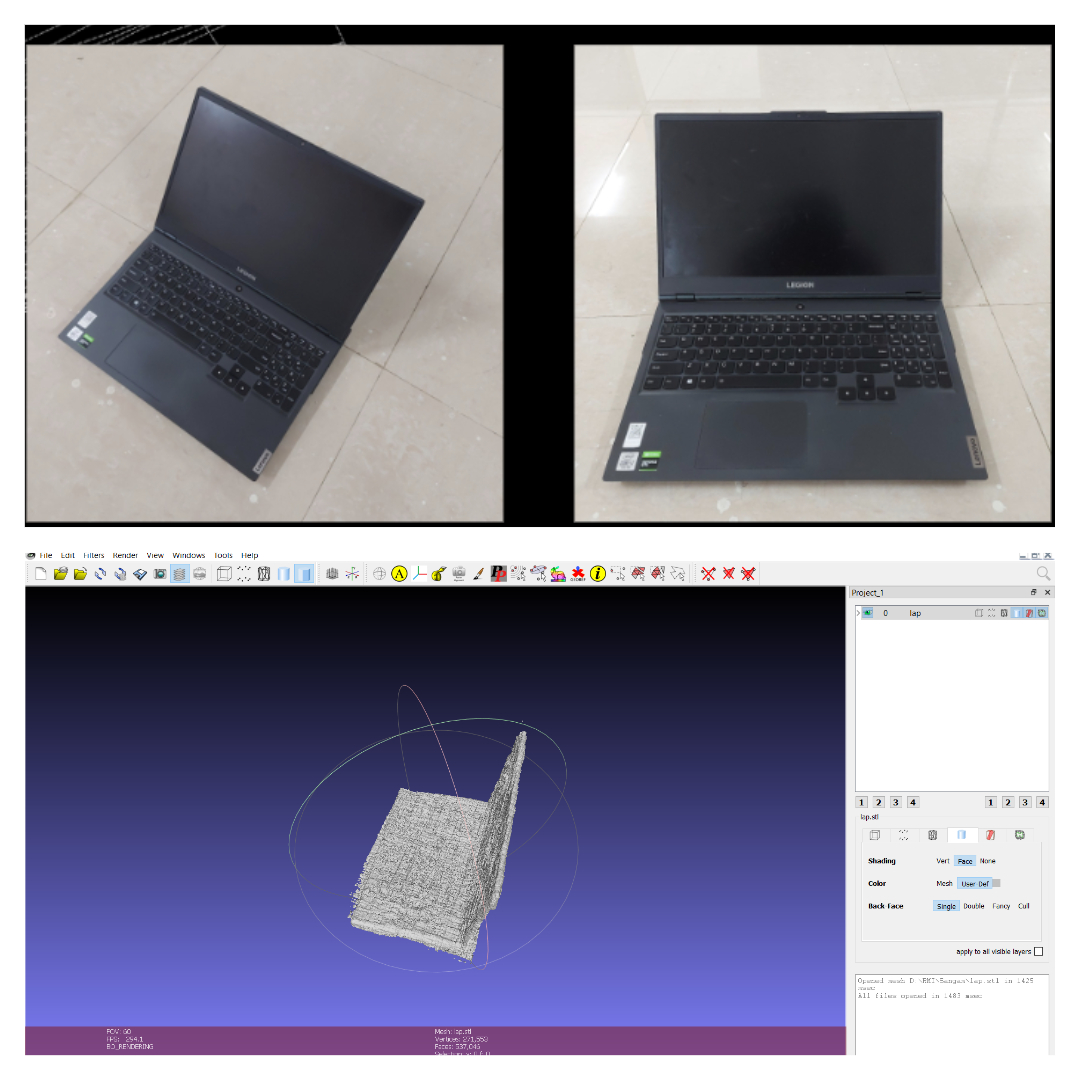
Structure-from-Motion and NeRF pipeline that transforms sparse captures into editable radiance fields for 3D asset creation and simulation.
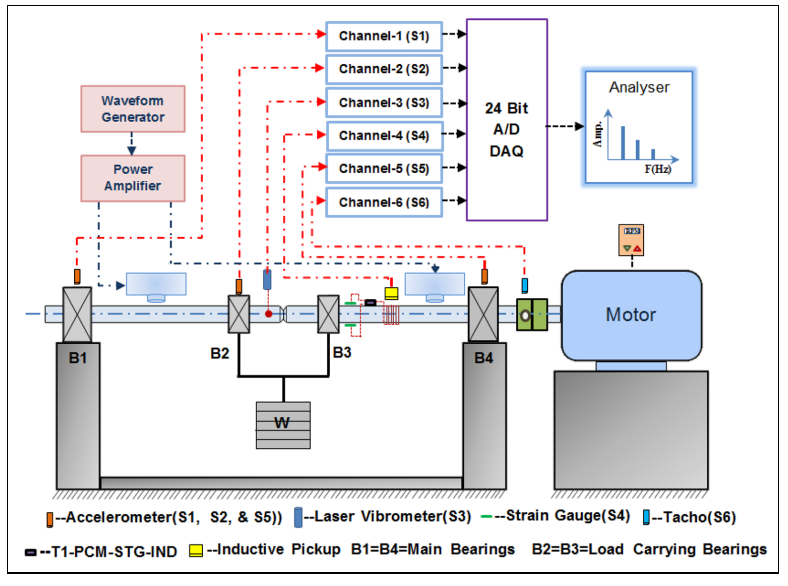
Machine learning analytics that fuse vibration data with LSTM models and dimensionality reduction to forecast rotor and bearing faults ahead of failure.
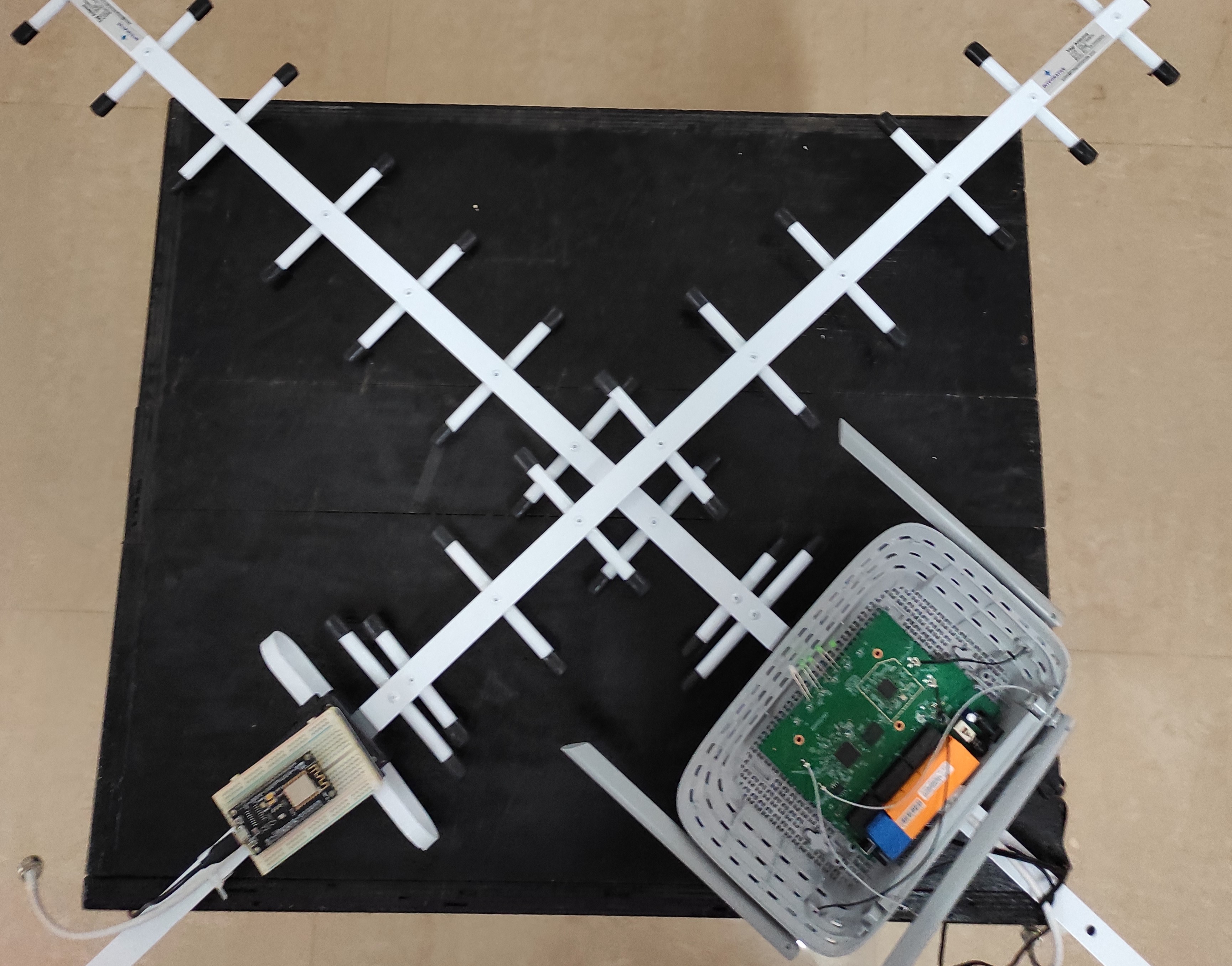
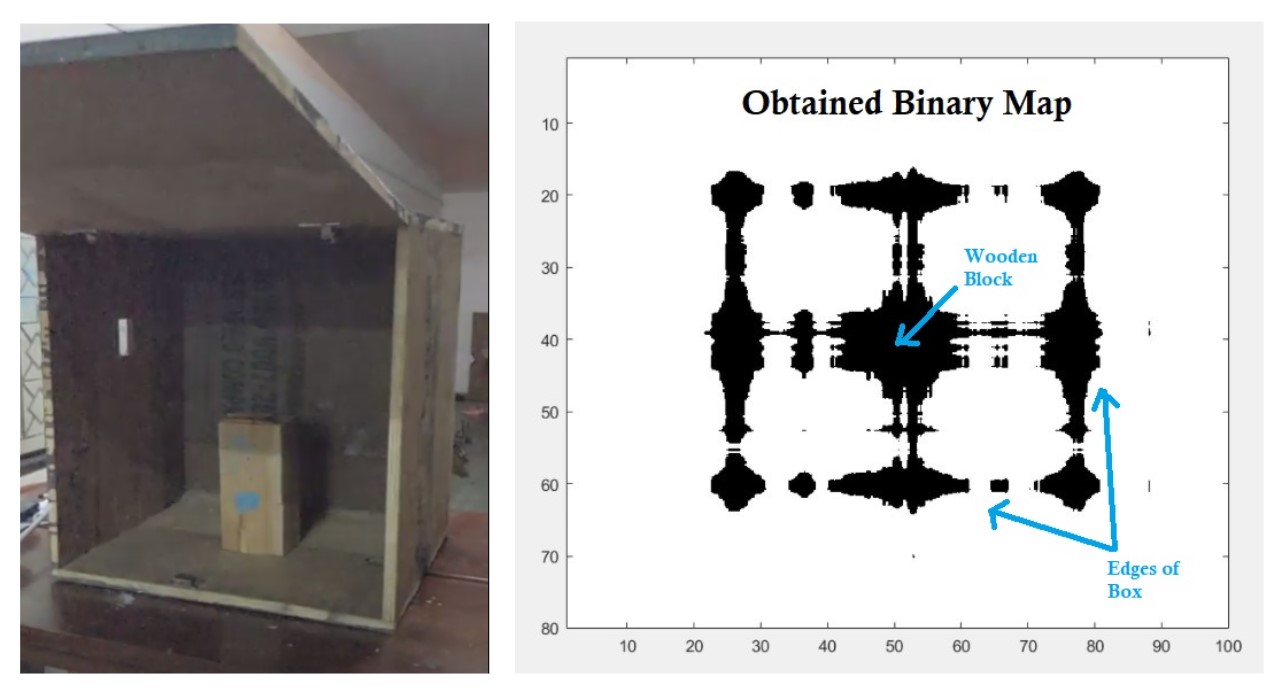
Wi-Fi signal-based mapping pipeline that reconstructs occluded geometry using compressive sensing for cooperative UAV deployments.

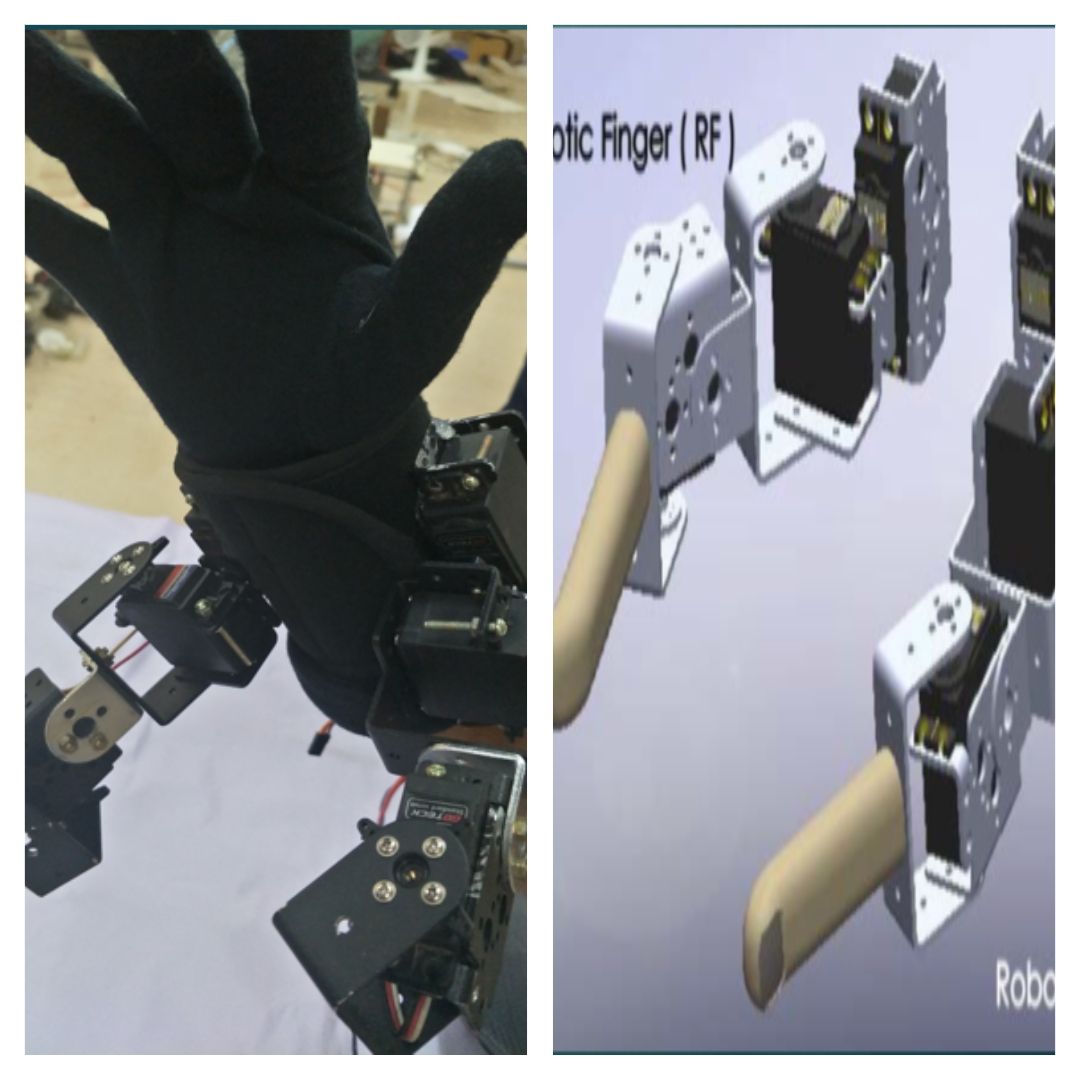
Wearable supernumerary fingers delivering intuitive control and assistive manipulation for patients progressing through upper-limb rehabilitation.
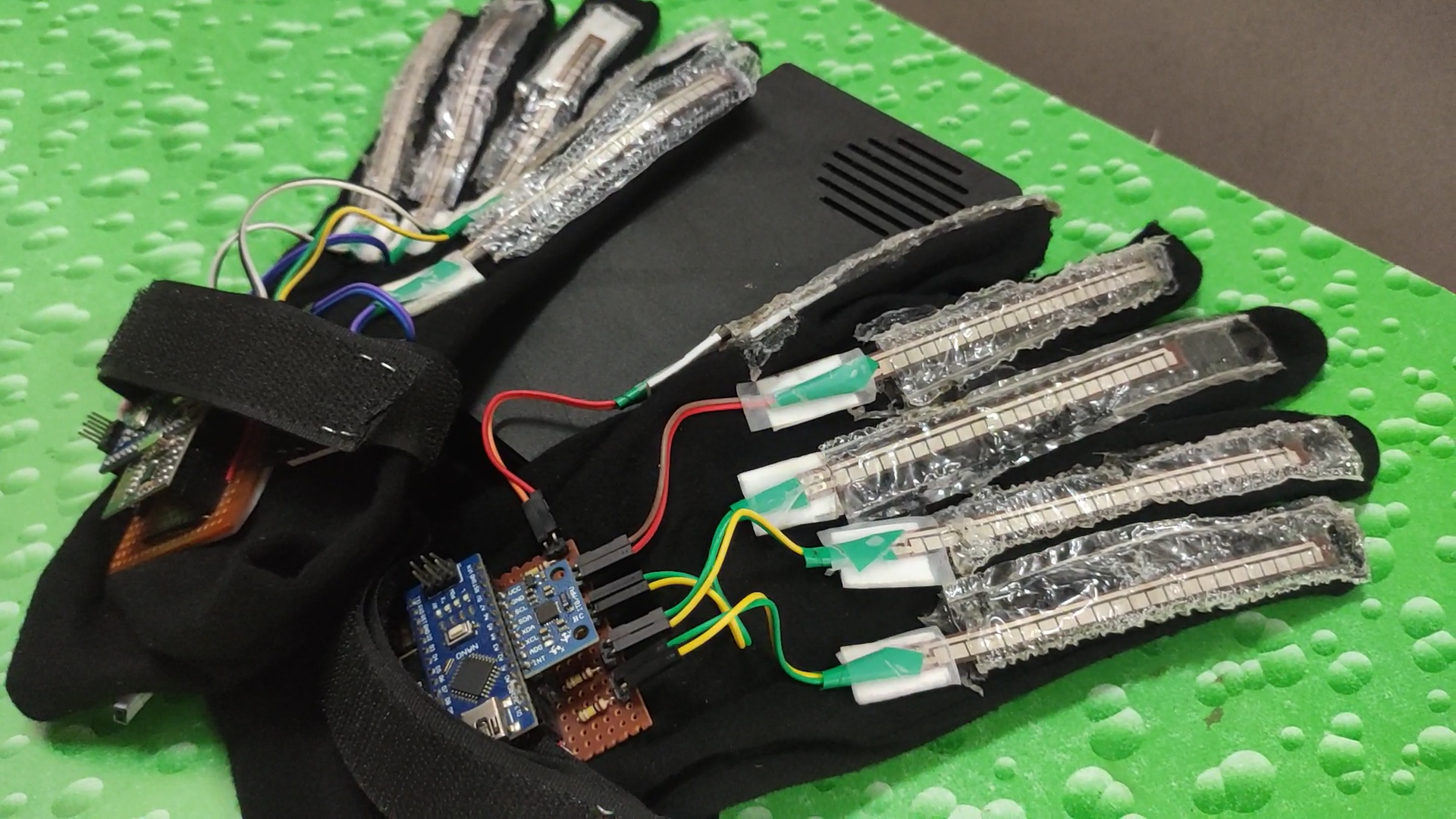
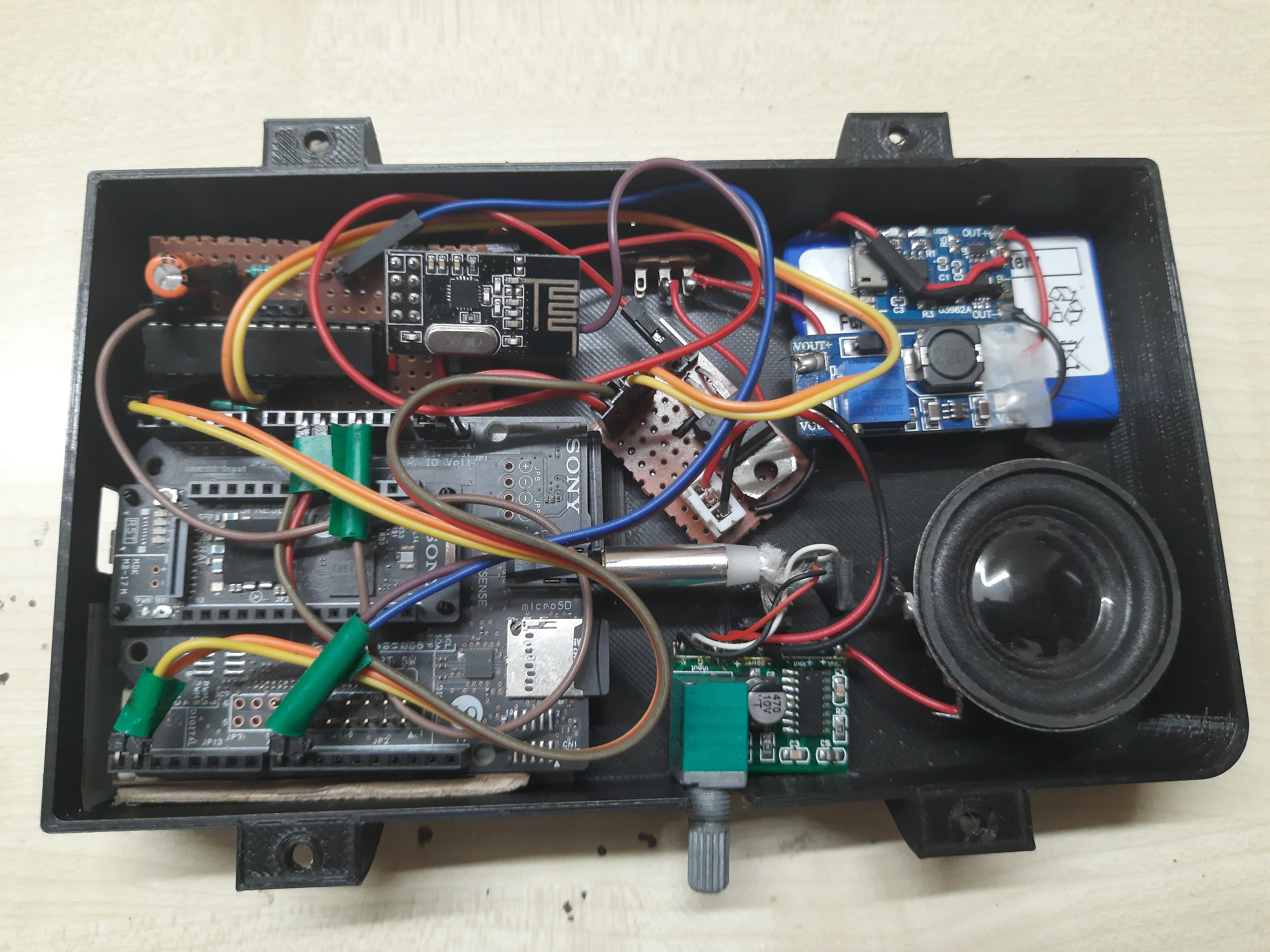
Battery-powered glove translating calibrated sign gestures into synthesized speech via multi-sensor fusion and LSTM decoding.
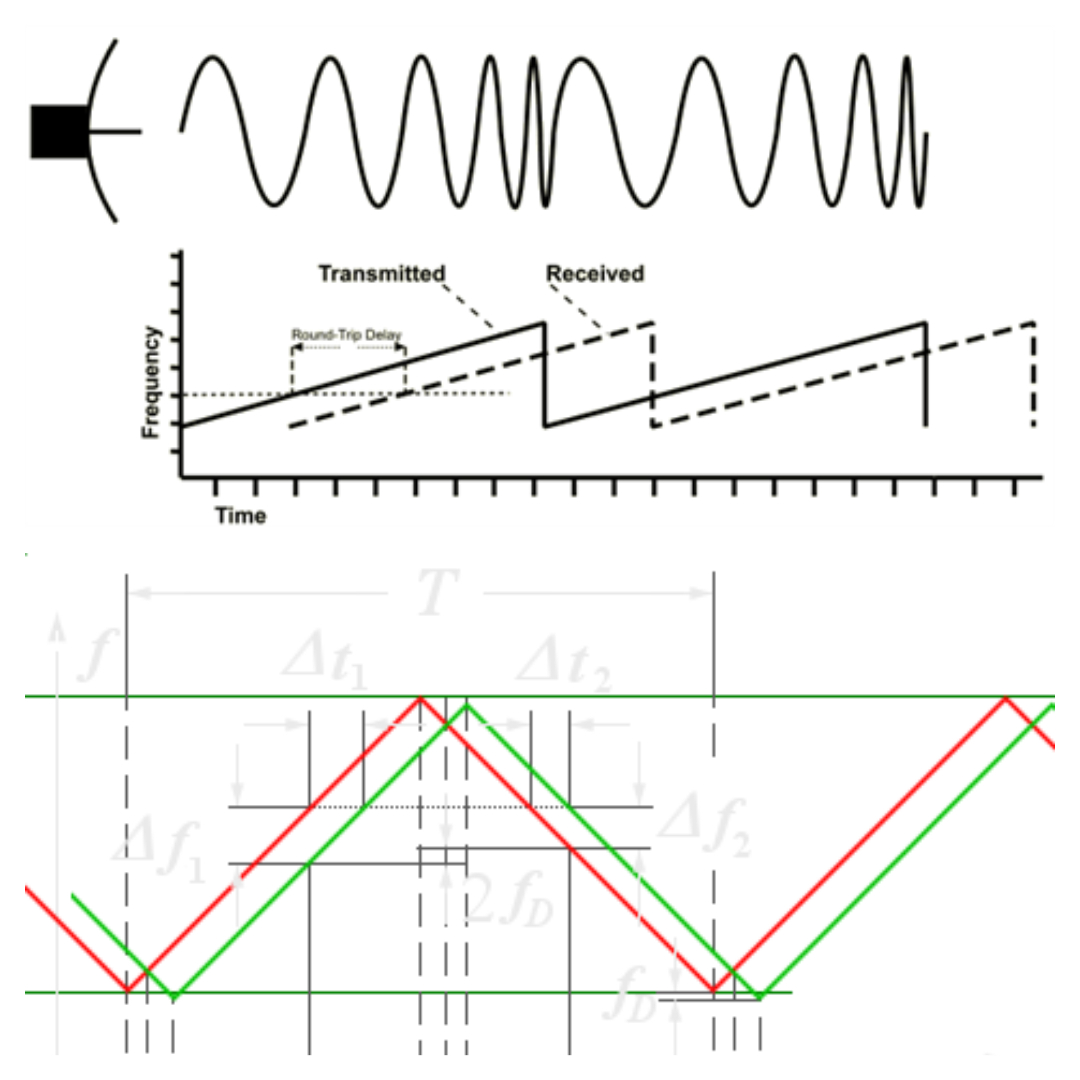
mmWave FMCW radar platform capturing wildlife respiration and heartbeat remotely while flagging anomalous activity in all-weather conditions.
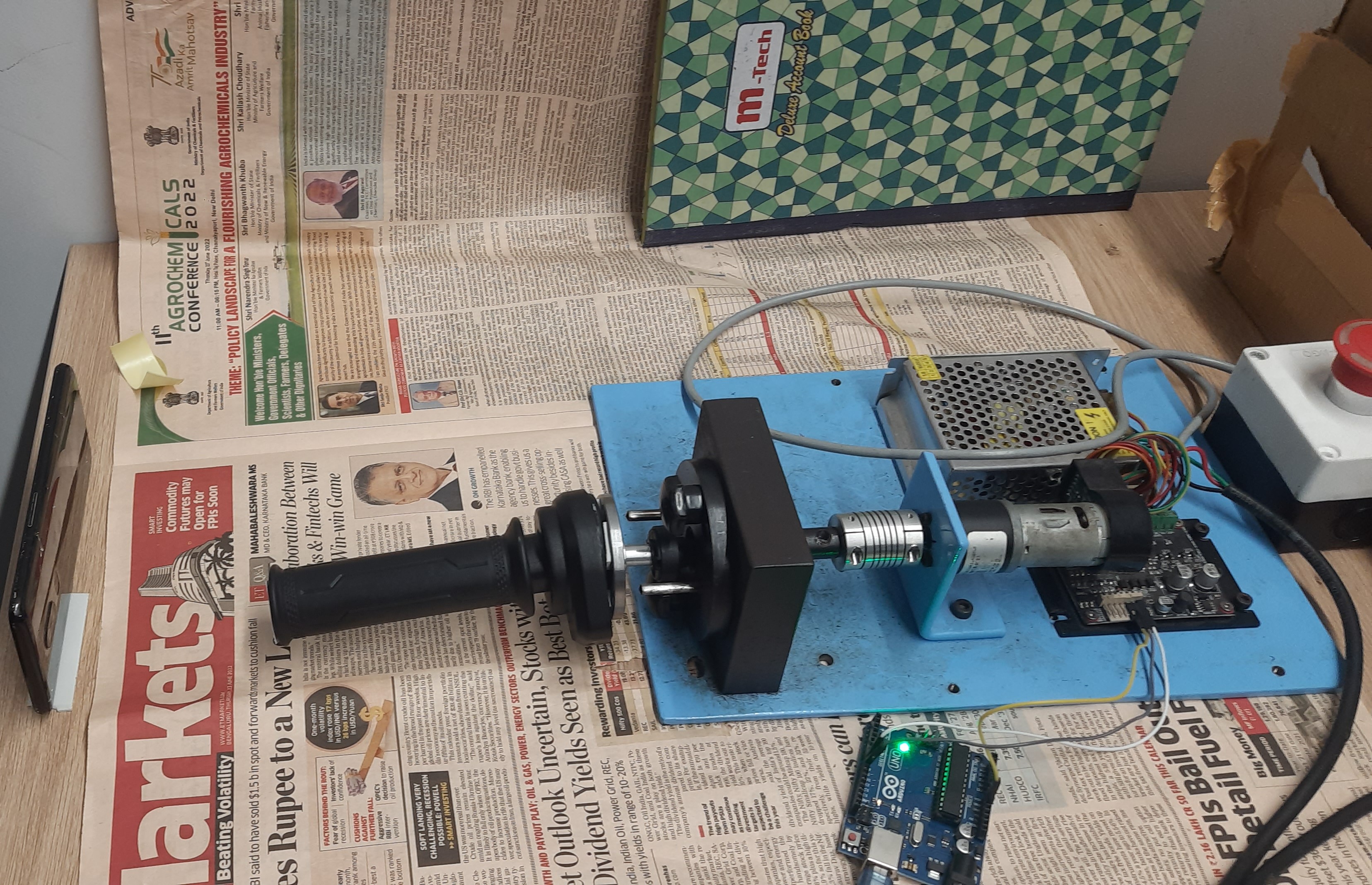


Replaced manual throttle sensor endurance testing with fiducial tracking, automated analytics, and fault alerts to improve throughput and safety.