Pepper: Multi-Modal Personal Assistant Robot
Pepper integrates SLAM, speech recognition, and deep learning-based object manipulation into a single platform designed for home assistant scenarios that demand reliable navigation and intuitive human-robot interaction.
Technology Stack
- SLAM via ROS gmapping paired with Microsoft Kinect depth sensing.
- Deep learning perception with CNN classifiers for 1000 object categories.
- Voice interaction using MFCC-based speaker identification and recognition pipelines.
- Custom three-layer chassis designed in AutoCAD and fabricated with acrylic for modularity.
Key Features
- Autonomous indoor navigation that fuses encoder and IMU data for drift-free localization.
- Personalized speech interface capable of identifying speakers and responding in real time.
- Object recognition and depth-guided grasping integrated with a 3-DoF manipulator.
- Modular design enabling rapid upgrades to sensors, actuators, and compute payloads.
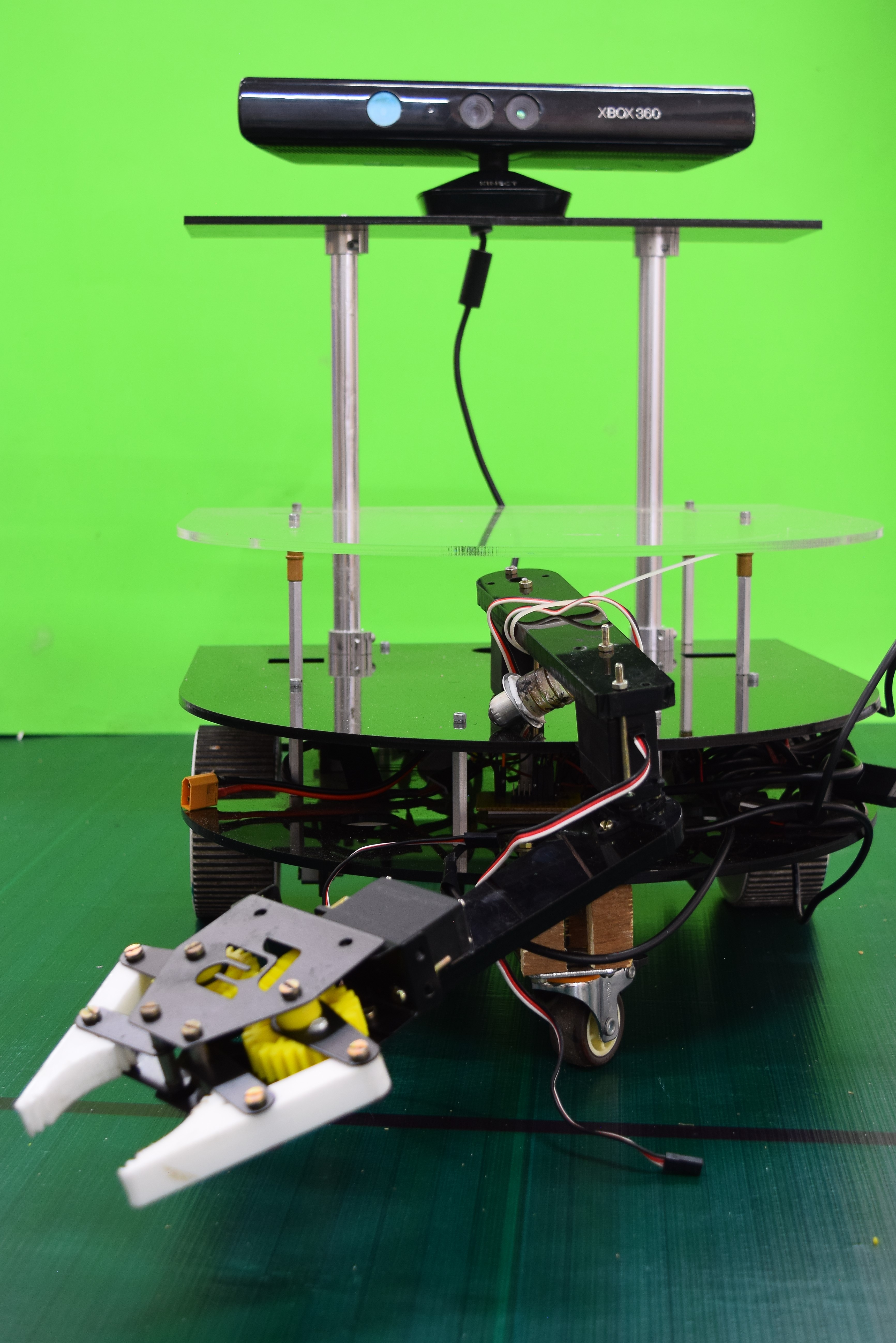
Robot Design
The three-tier chassis houses power electronics, motor drivers, a 3-DoF manipulator, and the onboard compute stack. Pepper employs high-torque drive motors with a caster wheel for stability, while a top-mounted Kinect sensor delivers RGB-D data for mapping and manipulation tasks.
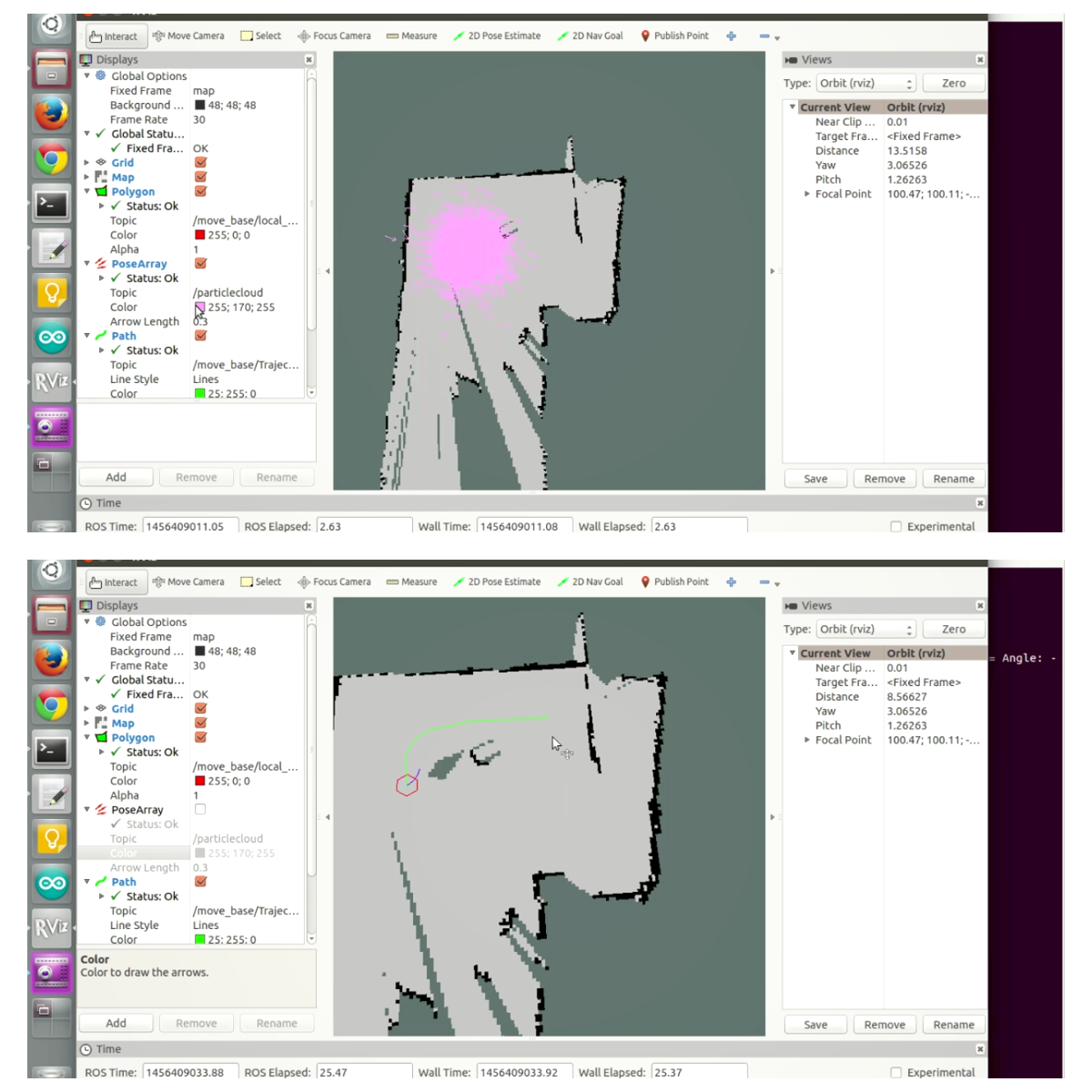
Autonomous Navigation
- Builds indoor maps using Kinect depth data and the ROS gmapping package.
- Applies Kalman filtering to fuse encoder and IMU signals, mitigating wheel slip and drift.
- Executes path planning and navigation across multi-room environments with obstacle avoidance.
Human Interaction
- Recognizes users via speech using MFCC vector embeddings and a text-independent classifier.
- Perceives objects through CNN-based recognition and depth-aware grasp targeting.
- Manipulates objects using a 3-DoF robotic arm and single-DoF gripper aligned with depth cues.
Outcome
The project demonstrates a cohesive assistant robot capable of mapping its environment, understanding verbal commands, and manipulating everyday objects, underscoring how accessible hardware can support rich personal robotics experiences.