Supernumerary Robotic Fingers for Therapeutic Recovery
Microcontrollers
Controls
Kinematics
ML
Sensors
Rehabilitative Robot

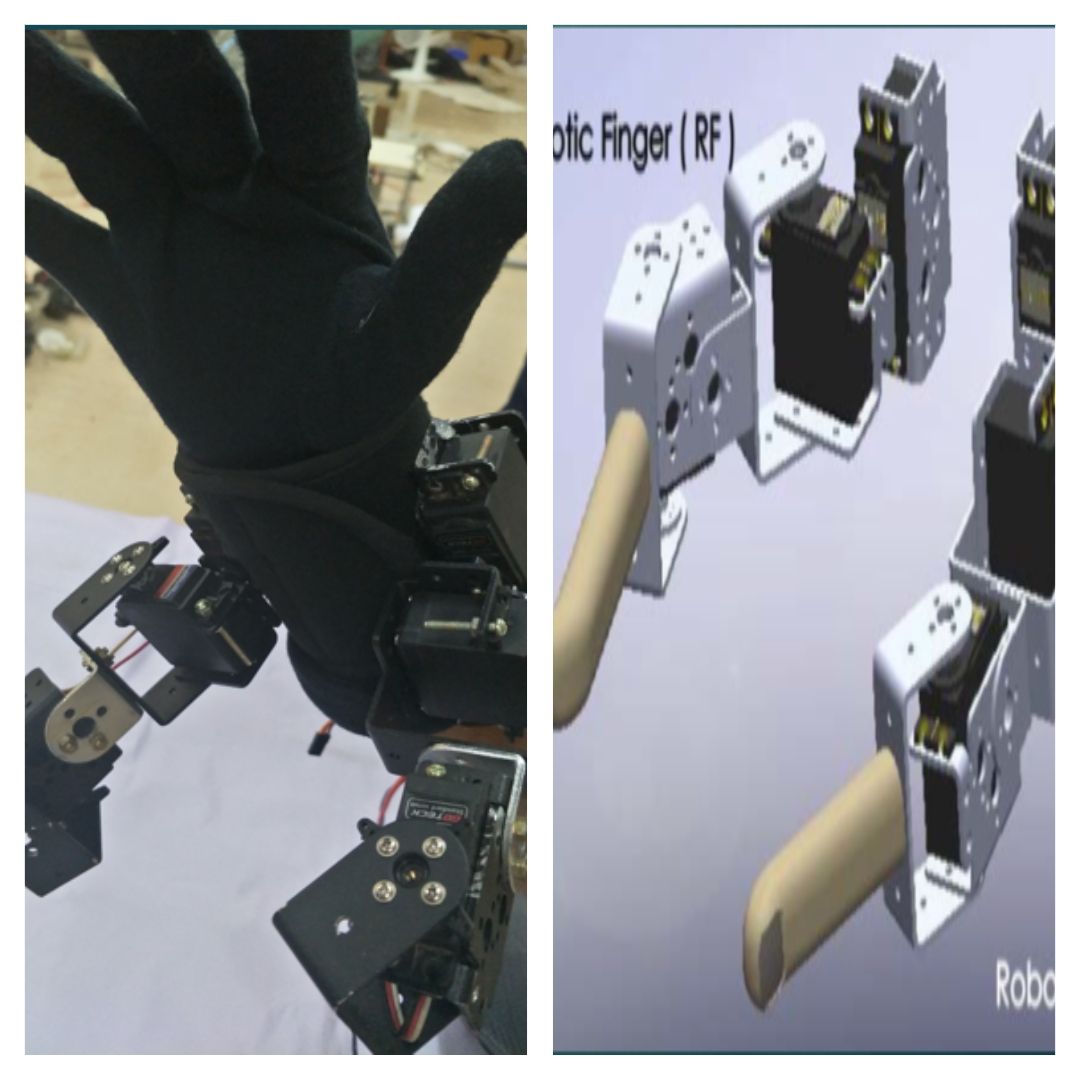
The Supernumerary Robotic Fingers (SRF) project delivers a wearable manipuland that augments human grasping, enabling patients in early-stage rehabilitation to perform bimanual tasks with adaptive, intuitive control.
Objective
Contributed to the development of a wearable robotic aid that compensates for limited hand mobility, focusing on intuitive control strategies that allow patients to regain independence during therapeutic recovery.
Technology Stack
- Machine learning models to map sensor inputs to actuation commands.
- Control systems designed for smooth, compliant motion in shared autonomy contexts.
- Wearable sensors including flex sensors and IMUs integrated into gloves for user intent.
- Compact microcontroller-based architecture powering the robotic fingers.
Key Features
- Two robotic fingers augment natural grasping for prehensile and manipulation tasks.
- Flex-sensor glove paired with IMU measurements enables intuitive, proportional control.
- Supports chronic hemiparetic users in daily activities while reinforcing rehabilitation protocols.
- Designed as an active compensatory tool for early recovery stages when grasp function is limited.
Impact
The SRF platform showcases how wearable robotics and intelligent control can bridge the gap between therapy and everyday independence, creating new opportunities for assistive technology deployment outside clinical settings.