VEX V5 Autonomy Tools
VEX V5
Robotics
Autonomy
Path Planning
Control
Education
Objective
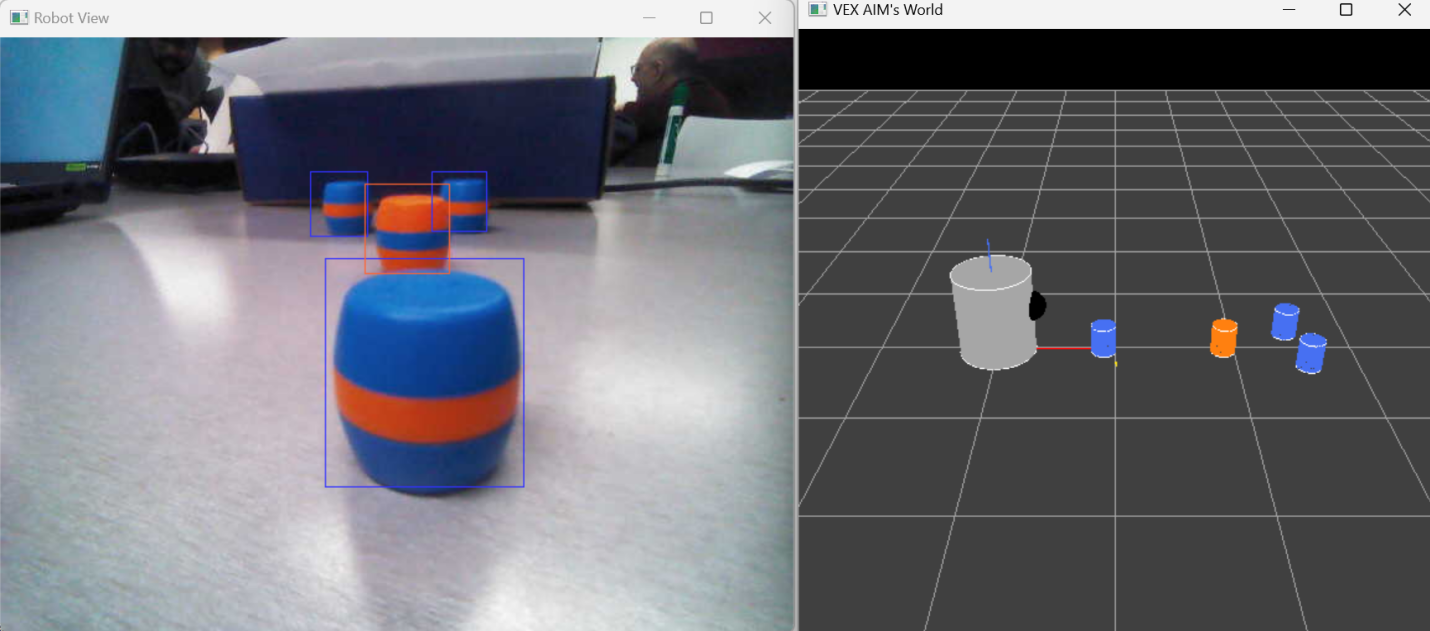
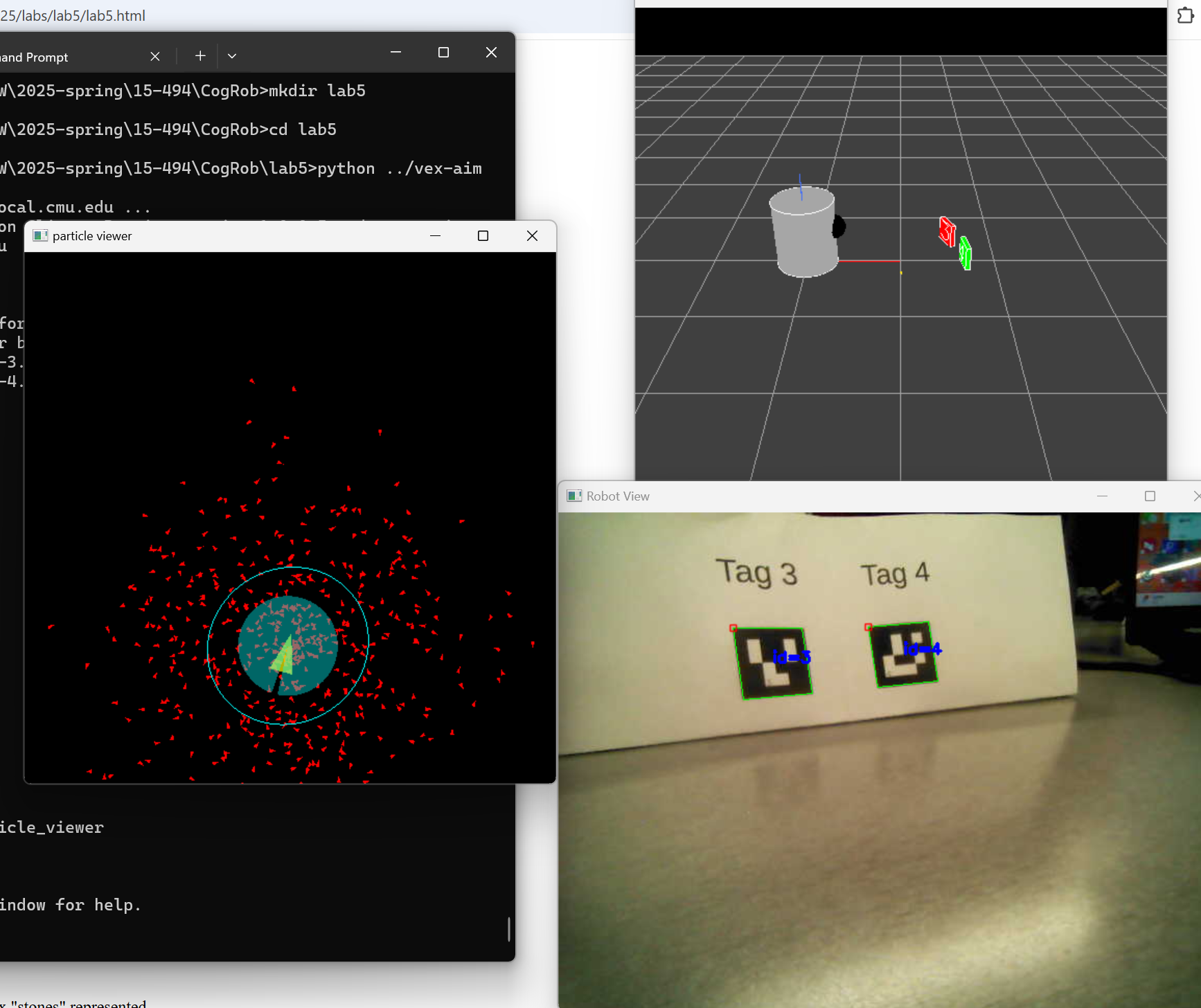
Build an end-to-end autonomy stack from scratch for the new VEX V5 robot used in 15-494/694, covering perception, state estimation, mapping, planning, control, and human-robot interaction. The stack enables classroom-ready labs and demos spanning SLAM with particle filters, grid-based and sampling-based planners, and a conversational interface that connects speech, symbolic reasoning, and scene understanding.
Key Features Achieved
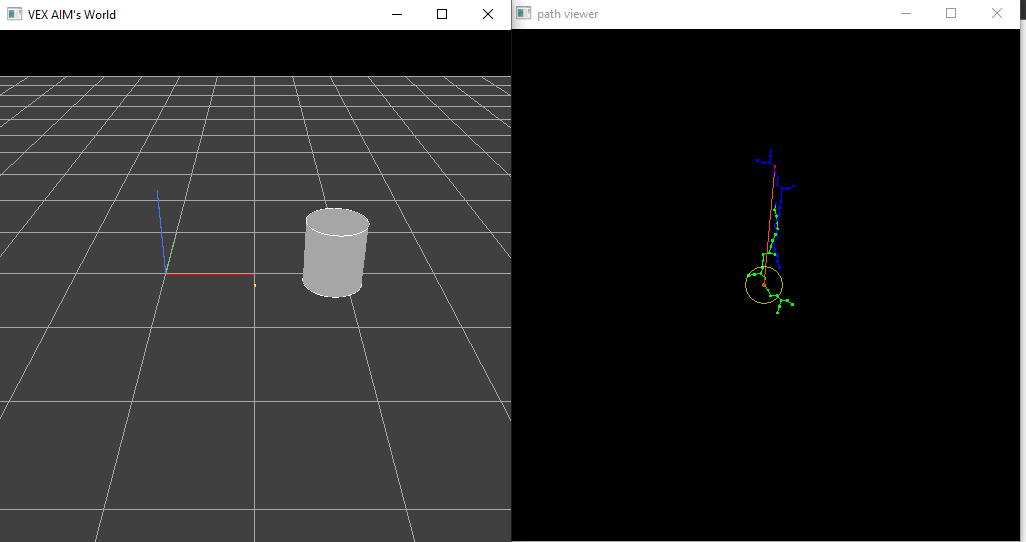
- Implemented particle-filter-based SLAM tailored to low-cost VEX V5 sensing and compute constraints.
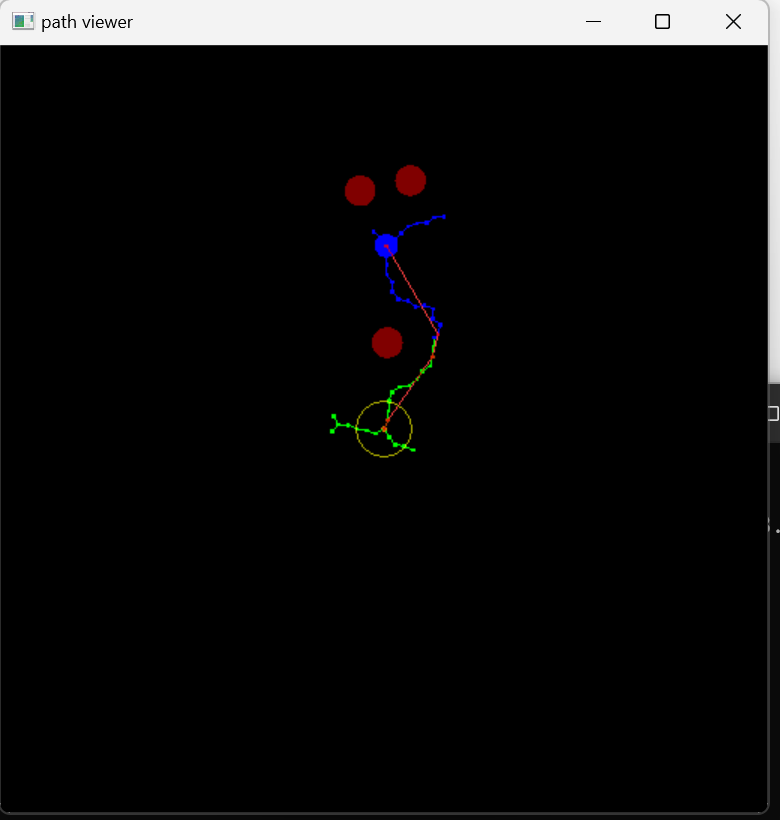
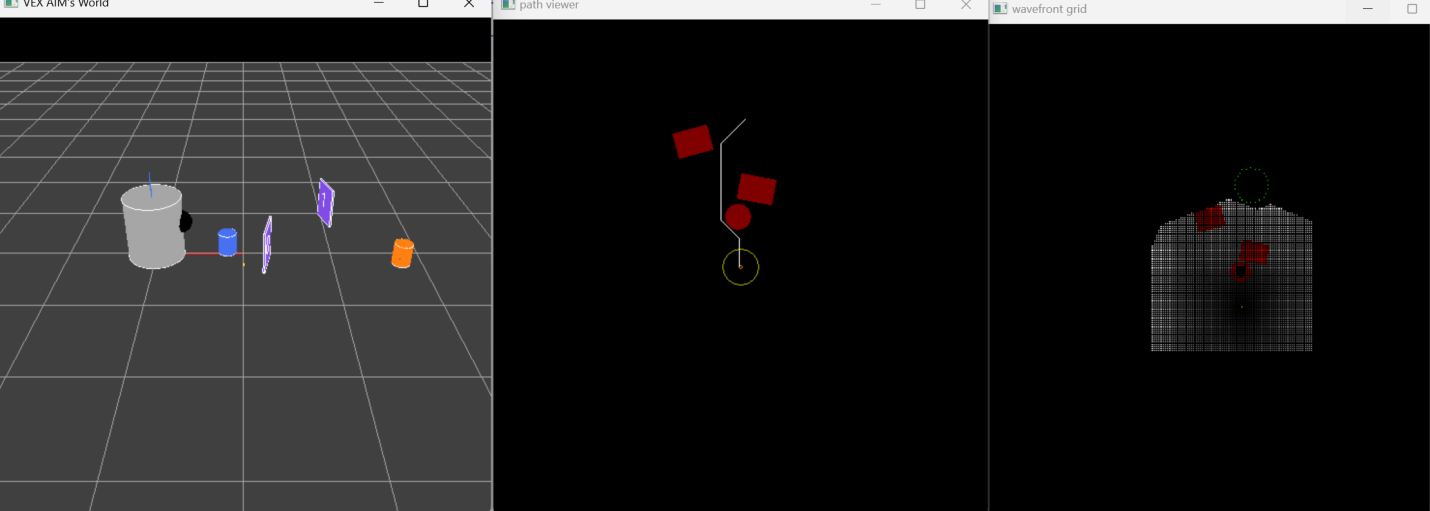
- Built global planners: Wavefront (grid-based) and RRT (sampling-based) with obstacle inflation and goal biasing.
- Integrated local motion primitives and controllers for reliable waypoint tracking and collision avoidance.
- Added conversational HRI: Google Speech-to-Text + ChatGPT API for symbolic planning and scene-aware commands.
- Packaged stack as modular labs/demos for course use with clear APIs and reference solutions.
Challenges & Learnings
- Resource limitations on VEX V5 required careful algorithmic tuning, map resolution tradeoffs, and efficient data structures.
- Speech and LLM integration needed robust grounding: intent parsing, symbol mapping, and safety checks before actuation.
- SLAM robustness improved via sensor calibration, resampling strategies, and motion-model refinement.
- Planner performance balanced completeness vs. speed; hybridizing Wavefront + RRT improved success rates.
- Curriculum integration emphasized reproducibility, documentation, and student-facing diagnostics.