Kailash Jagadeesh
I’m a graduate student in Robotic Systems Development (MRSD) at Carnegie Mellon University, where I explore how perception, planning, and control intertwine to create embodied intelligence in robots. My goal is to build systems that don’t just execute commands—but understand, adapt, and act fluidly in the real world.
Before CMU, I spent two years at Ola Electric designing and validating the electrical systems that power India’s top electric scooters—working across vehicle architecture, automation, and system integration.
Today, my work spans dual-arm manipulation, 3D perception, and adaptive control—integrating learning and classical robotics to push the boundary between simulation and physical embodiment. I’m deeply interested in how structured control and data-driven learning can together yield robust, generalizable robotic behavior.
Outside the lab, I’m a storyteller at heart—drawn to the kind of creativity found in anime, comics, and world-building. I enjoy projects that blur the line between research and art, transforming bold ideas into systems that quite literally move.
Email /
LinkedIn /
Github /
Resume

Featured Projects
A glimpse into recent robotics, AI, and machine learning work. Explore the full project library for detailed write-ups and supporting resources.
View all projects →
|
|
|
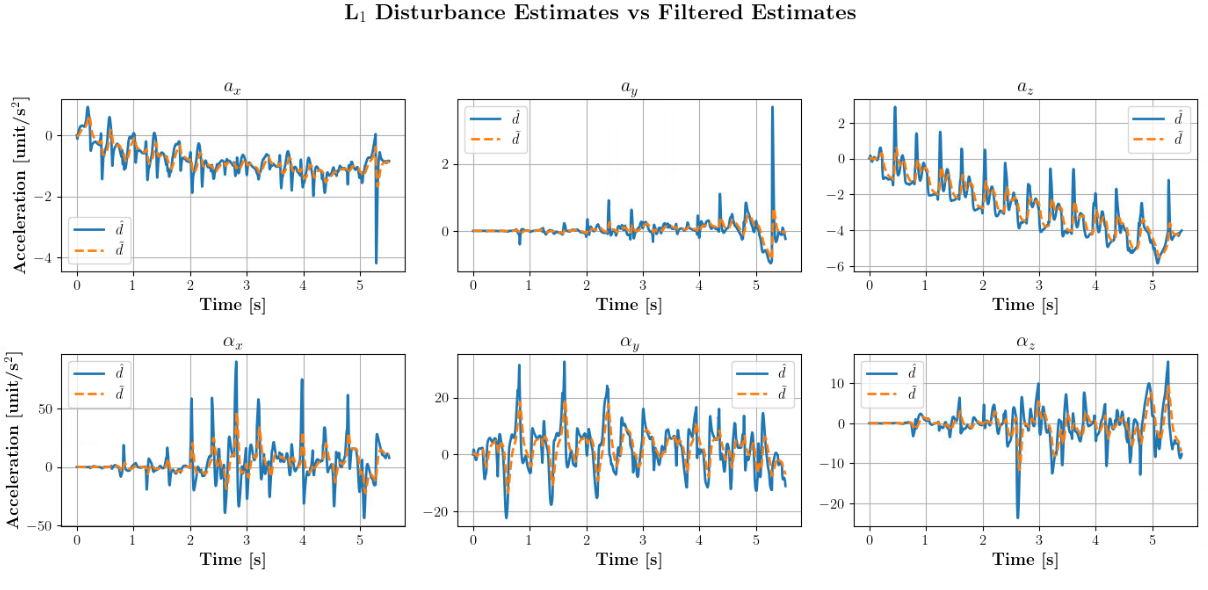
Augmenting Learned Centroidal Controller with Adaptive Force Control
Research Project, Carnegie Mellon University, 2025
Under the Optimal Control & Reinforcement Learning track
case study
/
code
/
report
/
poster
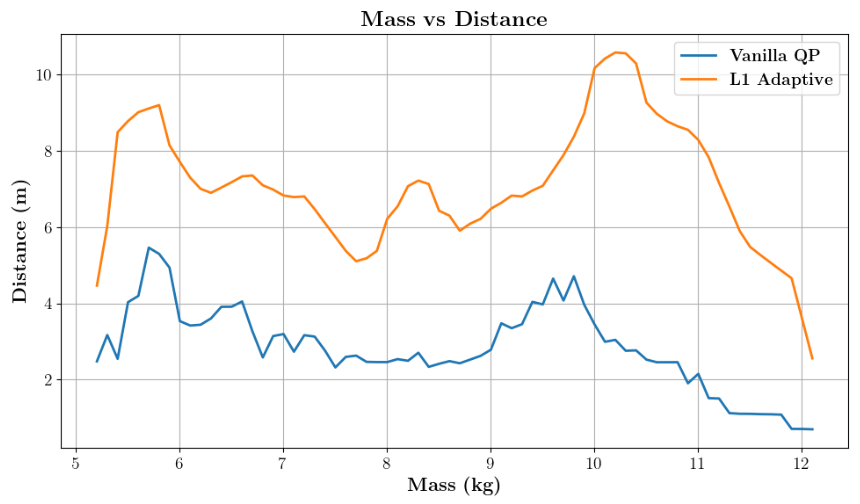
Enhanced the CAJUN hierarchical RL framework for quadrupedal jumping by replacing its low-level QP solver
with an L1 adaptive control law. Improved robustness to model uncertainty and payload variation, achieving
up to 4× performance gains in perturbed simulation environments while maintaining stable adaptive responses.
|
|
|
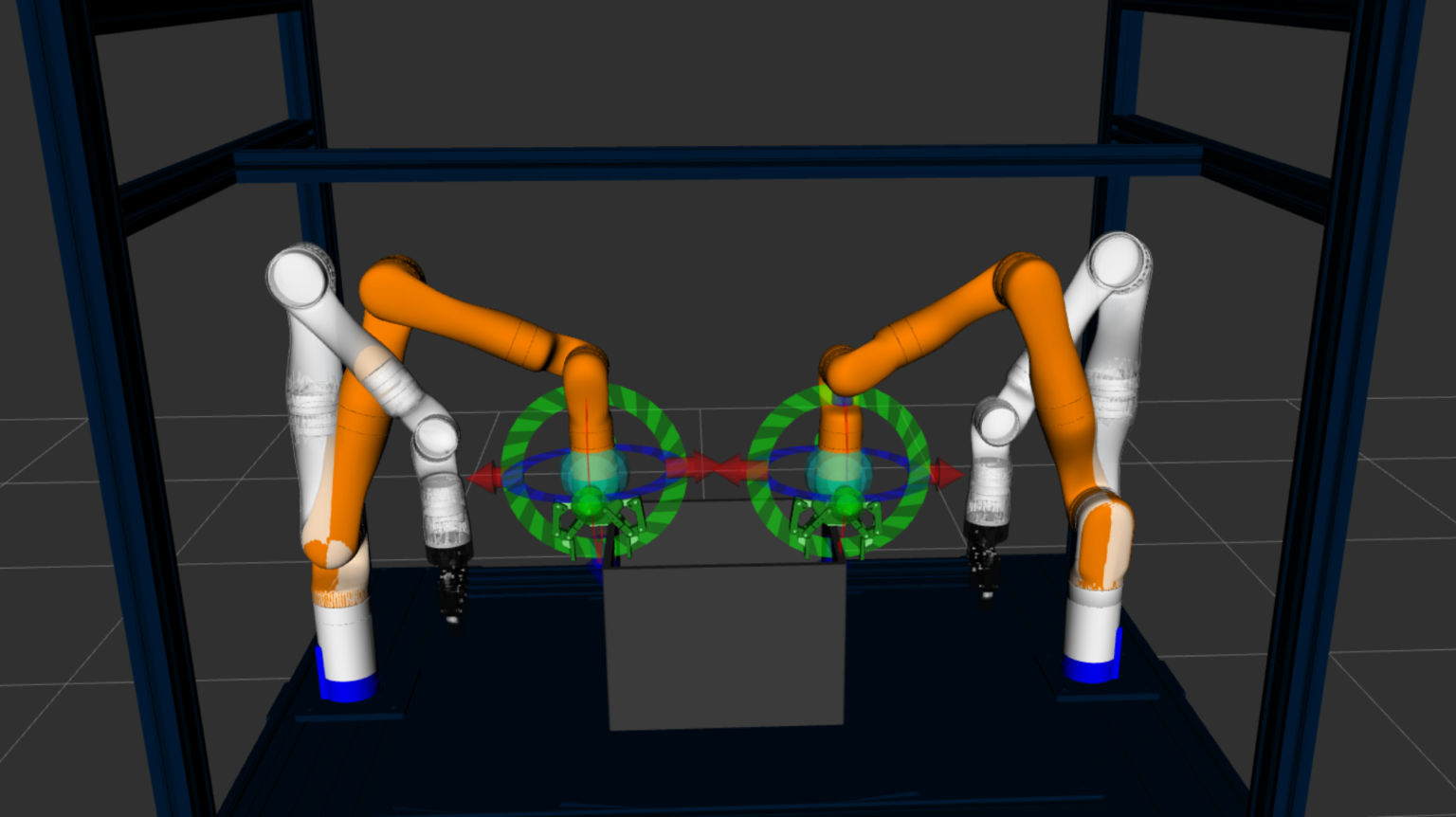
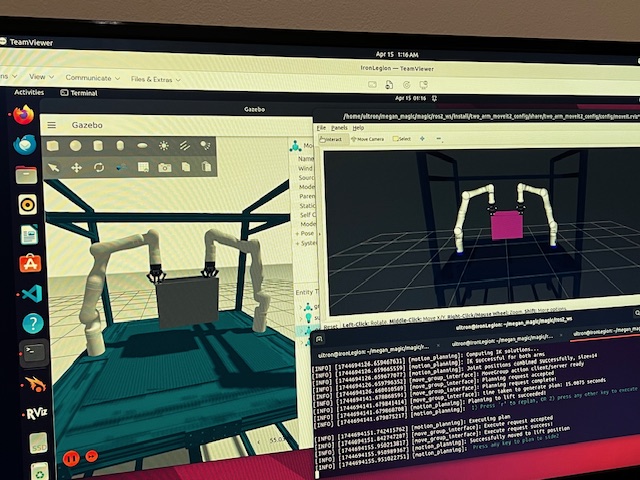
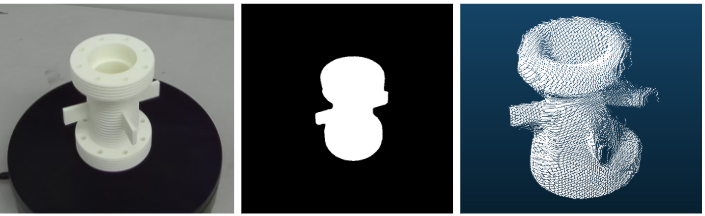
MAGIC: Manipulation for Automated Geometric Inspection and Construction
Capstone Project, Carnegie Mellon University, 2024–2025
Dual-Arm Manipulation, Perception, 3D Reconstruction
case study
/
code
/
report
/
website
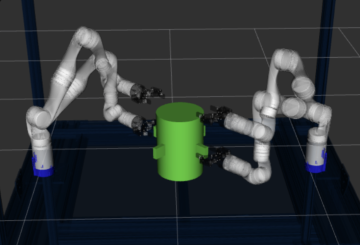
Built a dual-arm inspection platform coordinating manipulation and RGB-D perception to achieve high-coverage, accurate 3D reconstruction of WAAM parts. Delivered modular ROS2 + MoveIt2 stack, pose estimation, and FSM-based control with real hardware validation.
|
|
|
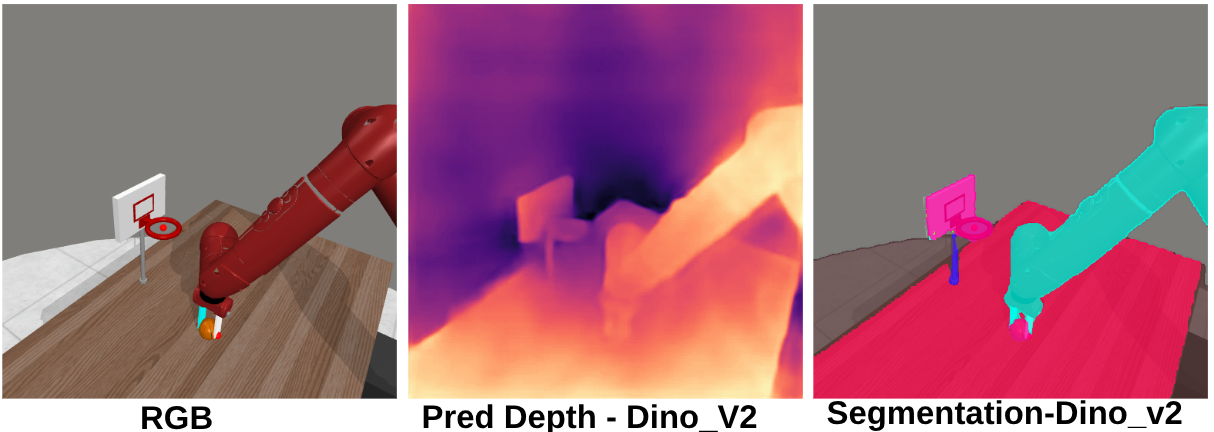
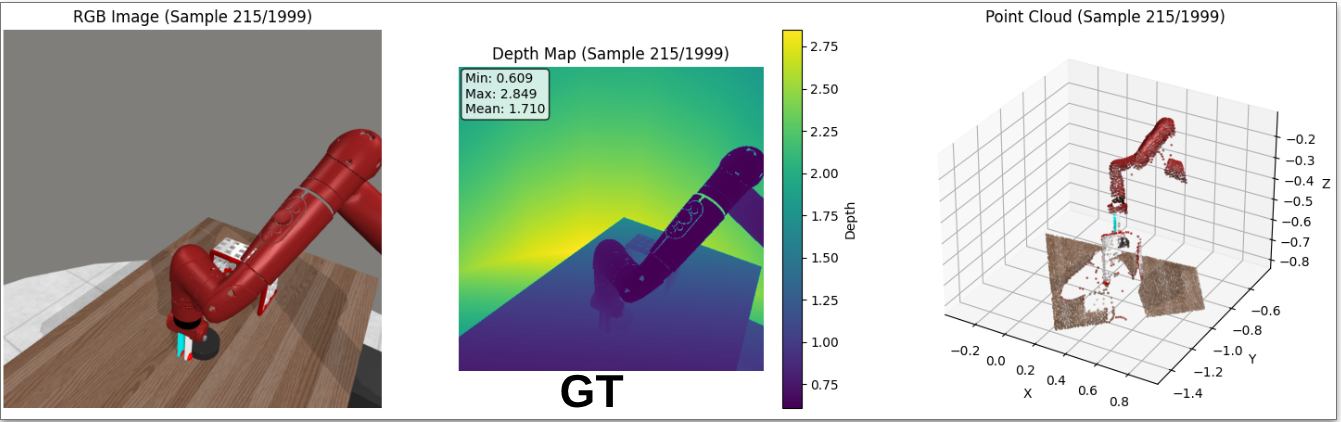
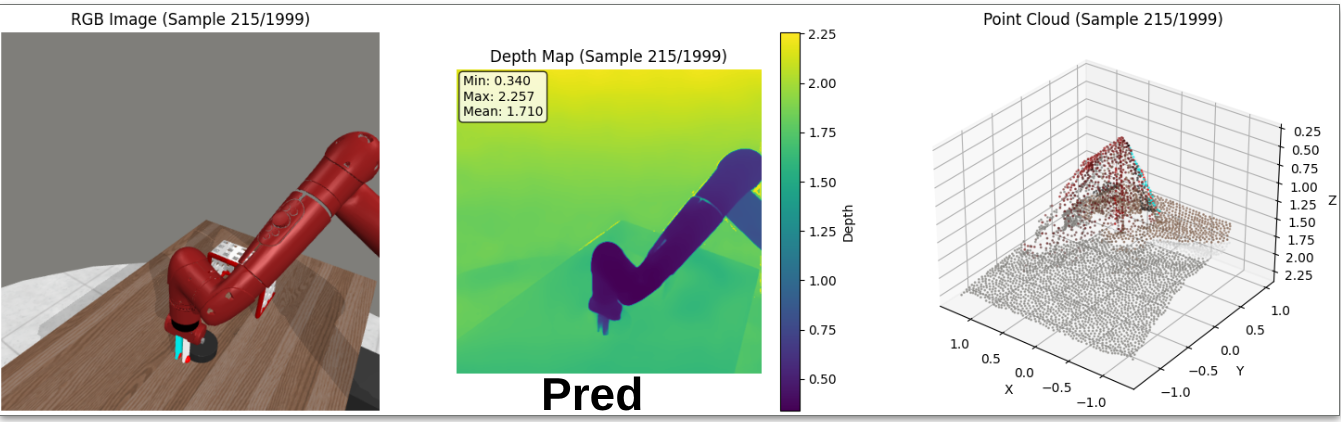
Enhancing 2D VLA Models with 3D Spatial Awareness
Research Project, Carnegie Mellon University, 2025
Robot Learning, Computer Vision, Diffusion Policy
case study
/
report
/
poster
/
github
Investigated methodologies to inject 3D spatial awareness into Vision-Language-Action (VLA) models using single-view RGB inputs. Benchmarked "software-only 3D" pipelines (Depth Anything v3, DINOv2) against 3D Diffusion Policies, achieving significant performance gains in complex manipulation tasks without physical depth sensors.
|
|
|
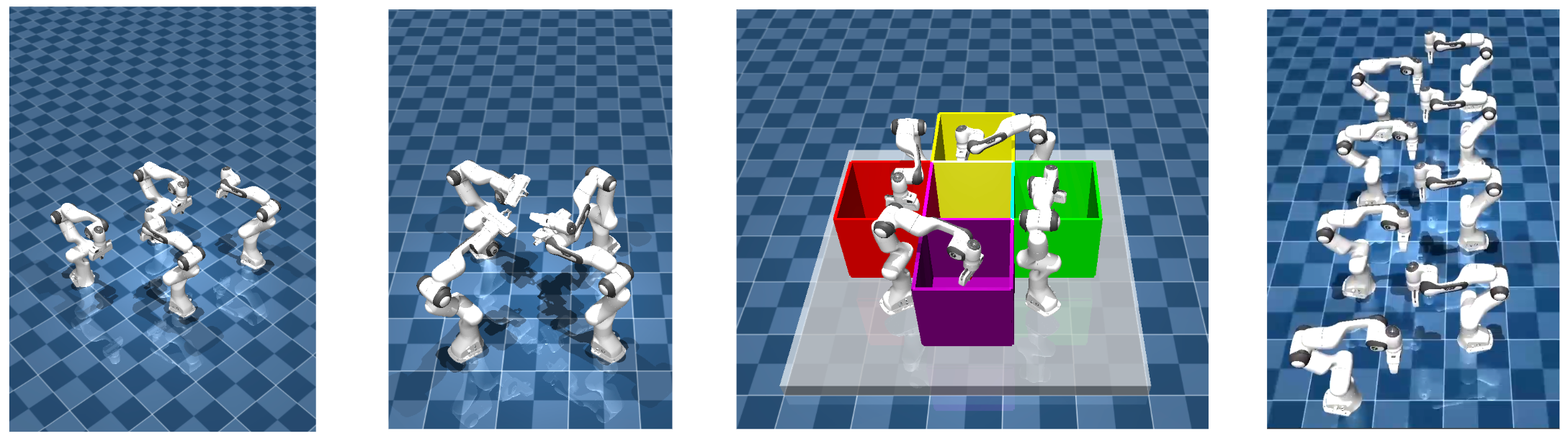
Accelerating Search-Based Planning for Multi-Robot Manipulation by Leveraging Online-Generated Experiences
Research Project, Carnegie Mellon University, 2025
Multi-Agent Planning, High-Dimensional Motion Planning
case study
/
report
/
presentation
/
github
Developed and benchmarked a full suite of planners (CBS, ECBS, RRT-Connect) from scratch in C++ to evaluate xECBS—an experience-accelerated algorithm. Leveraged online experience reuse to coordinate up to 8 Franka arms, achieving 3.3x speedups in complex workspaces while maintaining theoretical suboptimality bounds.
|
|
|
Functional Locomotion Policy for rough terrain traversal for Wheeled Biped
Research Project, 2025
Wheeled Biped Locomotion
case study
Research Objective: Develop a robust locomotion policy for a wheeled-biped robot that safely traverses uneven terrain while maintaining stability and minimizing payload disturbance (e.g., preventing liquid spillage). Explore control and learning strategies that generalize across variable surfaces and slopes.
|

|
Robotics / Mechatronics Engineer Intern
Advanced Mechatronics | Semiconductor Robotics
Key Achievements:
• Sensor Drift Analysis: Modeled and characterized sensor drift in robotic end-effectors through time-series experimentation and diagnostics.
• Health Monitoring: Developed predictive algorithms to detect and forecast actuator brake failures, improving uptime and reliability.
• Multi-Agent Coordination: Conceptualized a planar reticle handling framework leveraging coordinated multi-agent motion for improved throughput and precision.
|

|
Assistant Manager – Electrical & Electronics Systems
EV R&D | Systems Integration | Testing & Automation
Key Achievements:
• Electrical Architecture: Designed and validated electrical systems for 5 production EV models, enabling seamless integration across hardware, firmware, and diagnostics.
• Cost Optimization: Led redesign initiatives for throttle, ESCL, and seat latch systems, achieving a 5% reduction in total electrical system cost.
• Powertrain & ABS Development: Engineered the M1 roadster’s powertrain control system and co-developed Ola’s first in-house ABS unit with custom test benches.
• ADAS Architecture: Defined sensor suite and compute requirements for L2.5 ADAS architecture under ISO-26262 FuSA guidelines.
|

|
Engineering Intern
Process Automation | Industrial Analytics
Key Achievements:
• Automation Integration: Deployed a real-time fault detection and sensor monitoring system to enhance process reliability in the rolling mill line.
• Data-Driven Maintenance: Designed a Python-based analytics dashboard integrating PLC data, reducing unplanned downtime by ~15%.
• System Benchmarking: Conducted control system performance analysis to identify energy and efficiency optimization opportunities.
|

|
Carnegie Mellon University
Master of Science in Robotic Systems Development (MRSD)
CGPA: 4.04 | August 2024 - May 2026
Coursework: Optimal Control and Reinforcement Learning(16-745), Learning for 3D Vision(16-825)Optimal Control and Reinforcement Learning(16-745), Computer Vision (16-720), Learning for 3D Vision (16-825), Robot Mobility, Manipulation, Estimation & Controls, Systems Engineering, Robot Autonomy Show more
|
|
National Institute of Technology Tiruchirappalli (NIT Trichy)
Bachelor of Technology (B.Tech) in Mechanical Engineering (with Focus in Computer Science)
August 2018 - July 2022
Coursework: Artificial Neural Networks, Industrial RoboticsArtificial Neural Networks, Industrial Robotics, Mechatronics, Control Systems, Database Management Systems Show more
|
|